
KPIT und dSPACE kooperieren: Umfassendes Lösungspaket für die Entwicklung der nächsten Generation von Bordladegeräten und für die Durchführung von Konformitätsprüfungen
KPIT Technologies, ein führender unabhängiger Software-Entwicklungs- und Integrationspartner der Automobil- und Mobilitätsindustrie, und dSPACE, einer der weltweit führenden Anbieter von Simulations- und Validierungslösungen, bieten gemeinsam eine umfassende Lösungssuite für die Entwicklung von Ladegeräten der nächsten Generation für Elektrofahrzeuge und Konformitätsprüfungen an.
Einfache, zuverlässige und sichere intelligente Lademöglichkeiten sind der Schlüssel für eine schnelle Verbreitung von Elektrofahrzeugen. Das Validieren und Testen der Ladetechnologien ist deshalb von größter Bedeutung. Als Ergebnis der Zusammenarbeit bieten KPIT und dSPACE ihren Kunden dafür nun eine Lösung aus einer Hand an. Die Kombination von Hardware- und Software-Komponenten bietet umfassende Testoptionen für das Mobilitätsökosystem.
KPIT hat eine umfangreiche, sofort einsatzbereite Suite von Konformitätstestbibliotheken entwickelt, die nahtlos mit der dSPACE Smart Charing Solution zusammenarbeitet. Die Testsuiten entsprechen den weltweiten Normen wie DIN 70122, ISO 15118 – 4/5, GB/T 34658 und CHAdeMO.
dSPACE steuert eine Schlüsselkomponente zu dem gemeinsamen Angebot bei: die Smart Charging Solution. Die Smart Charging Solution besteht aus der Smart Charging Interface Software mit einem Simulink-Modell zur Simulation des Ladesäulen Verhaltens, vordefinierten Layouts für dSPACE ControlDesk und dem DS5366 Smart Charging Interface für Powerline-basierte Kommunikation. Als offene Testlösung läßt sich die Smart Charging Conformance Test Solution flexibel an die Funktionalität des zu testenden Geräts anpassen, verfügt über eine intuitive grafische Benutzeroberfläche und bietet automatisierte Testausführungen sowie detaillierte Berichte. Die Smart Charging Solution Suite ermöglicht es Automobilherstellern sowie Ladestationsunternehmen, die Entwicklung und das Testen von Technologien zu beschleunigen, die am Ladeprozess von Elektrofahrzeugen beteiligt sind.
Die Testbibliotheken sind nicht auf die in der Norm definierten Bibliotheken beschränkt. Der gesamte Aufbau lässt sich leicht in eigene oder vorhandene Tools integrieren. Die Testsuite kann für Ladekommunikation, Leistungstests beim Laden und andere Elektrifizierungsanwendungen verwendet werden. Die Unternehmen arbeiten daran, einsatzbereite Suiten für kommende Normen wie ISO 15118-20, SAE J2984, SAE J2593-2, GB/T 34657-2 und ChaoJi einzuführen.
Anup Sable, Chief Technology Officer von KPIT Technologies sagte: „Wir freuen uns auf die Zusammenarbeit mit dSPACE. Die Expertise, die dSPACE für die Validierung von Hardware und Lösungen in die Kooperation einbringt, ergänzt KPITs Fokus auf Antriebsstrang-Software und unsere Erfahrung bei der Arbeit an führenden Elektrifizierungsprogrammen.“
Markus Plöger, Director Elektromobilität und elektrische Antriebe bei dSPACE, erklärte: „KPIT bringt das Know-how eines erfahrenen Software-Systemintegrators in die Partnerschaft ein. Gemeinsam werden wir unsere Kunden in der Automobilbranche dabei unterstützen, Ladetechnologien schneller zur Marktreife zu bringen. Die Entwicklung des gemeinsamen Angebots hat zu einer Lösung geführt, die eine reibungslose Benutzererfahrung gewährleistet und alle wichtigen globalen Normen und Standards berücksichtigt und damit umfassende Tests für die immer komplexeren Ladetechnologien ermöglicht. “
Über dSPACE
dSPACE ist ein weltweit führender Anbieter von Simulations- und Validierungslösungen für die Entwicklung vernetzter, selbstfahrender und elektrisch angetriebener Fahrzeuge. Die End-to-End-Lösungen des Unternehmens werden insbesondere von Automobilherstellern und ihren Zulieferern genutzt, um die Software- und Hardware-Komponenten ihrer neuen Fahrzeuge zu testen, lange bevor ein neues Modell auf die Straße kommt. Nicht nur in der Fahrzeugentwicklung ist dSPACE ein gefragter Partner, auch in der Luft- und Raumfahrt sowie in der industriellen Automatisierung vertrauen Ingenieure auf unser Know-how. Unser Portfolio reicht von End-to-End-Lösungen für Simulation und Validierung über Ingenieur- und Beratungsdienstleistungen bis hin zu Schulungen und Support. Mit mehr als 2.000 Mitarbeitern weltweit ist dSPACE in Paderborn und drei Projektzentren in Deutschland sowie durch Landesgesellschaften in den USA, Großbritannien, Frankreich, Japan, China, Korea und Kroatien vertreten.
KPIT ist ein führender unabhängiger Software-Entwicklungs- und Integrationspartner, der die Mobilität auf dem Weg in eine saubere, intelligente und sichere Zukunft unterstützt. Mit 7.000 Automobilisten auf der ganzen Welt, die sich auf eingebettete Software, KI und digitale Lösungen spezialisiert haben, beschleunigt KPIT die Implementierung von Technologien der nächsten Generation für den zukünftigen Mobilitätsfahrplan bei seinen Kunden. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem im Wandel befindet. Weitere Informationen finden Sie unter www.kpit.com.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Vice President Corporate Communications
Telefon: +49 (5251) 1638-714
E-Mail: bsm@dspace.de
Senior Communications Manager
Telefon: +49 (5251) 1638-941
E-Mail: unolte@dspace.de
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()

KPIT, dSPACE und Microsoft bieten Lösung für die Homologation von autonomen Fahrzeugen an
- Die datengetriebene Simulation und Homologation für die Entwicklung des autonomen Fahrens erfordert Know-how in den Bereichen DevOps, Cloud Computing, Simulation und Automatisierung.
- Nutzen für das Mobilitäts-Ökosystem: beschleunigte Entwicklung des autonomen Fahrens bei optimierten Entwicklungskosten.
- Die Unternehmen vereinen Spitzenleistungen in den Bereichen künstliche Intelligenz, Software, Hardware, Verifizierung und Validierung sowie Cloud-Dienste.
- Die Lösung wird den gesamten Entwicklungsprozess beschleunigen und optimieren, von der Datenerfassung und Software-Entwicklung bis hin zur Integration und Tests im Fahrzeug.
KPIT Technologies, dSPACE und Microsoft haben sich zusammengeschlossen, um eine einzigartige Lösung für OEMs und Tier-1s anzubieten, die eine Homologation für anspruchsvolle Fahrerassistenzsysteme und autonomes Fahren zum Ziel hat.
Die Zertifizierung von autonomen Fahrzeugen erfordert es Millionen von Testkilometern abzuspulen. Dies kann nur durch datengetriebene Simulation erreicht werden, die spezialisierte Tools, Know-how und Infrastruktur erfordern. Der gemeinsame Ansatz von KPIT, Microsoft und dSPACE sorgt nun für Effizienz und Effektivität durch eine Lösung für OEMs und optimiert die Entwicklungskosten.
KPIT bringt seine jahrzehntelange Erfahrung bei der Entwicklung, Validierung und Integration von Anwendungen für das autonome Fahren in die Technologie-Roadmaps ein. Zudem stellt das Unternehmen sein Fachwissen in den Bereichen Software-Entwicklung, Integration und Validierung bereit. KPIT bringt darüber hinaus eine Reihe von virtuellen Simulations- und Validierungswerkzeugen ein, die speziell für autonome Fahranwendungen entwickelt wurden.
dSPACE steuert Werkzeuge und Lösungen für die datengetriebene Entwicklung, Simulation und Validierung bei. Das Unternehmen unterstützt seine Kunden seit mehr als 30 Jahren bei der Verbesserung ihrer Validierungsmethoden und bietet OEMs und Tier-1s neue Lösungen für die Entwicklung von Anwendungen für das autonome Fahren. Zu diesem Zweck hat dSPACE kürzlich SIMPHERA auf den Markt gebracht, eine webbasierte, hochskalierbare Cloud-Lösung, mit der Anwender die rechenintensive Validierung von Funktionen für das autonome Fahren schnell und einfach durchführen können. SIMPHERA unterstützt die Zusammenarbeit von weltweit verteilten Entwicklungsteams und ermöglicht den Kunden eine nahtlose Integration ihrer Anwendungen.
Microsoft Azure Core and Services helfen Automobilherstellern, ihre digitale Transformation zu beschleunigen, indem sie globale Cloud-Dienste und Rechenkapazitäten bereitstellen, die speziell auf die Virtualisierung von Infrastruktur und Netzwerken für die Entwicklung und Validierung von ADAS-Funktionen zugeschnitten sind – und das auf kostengünstige, skalierbare und reproduzierbare Weise.
Die im Rahmen dieser Zusammenarbeit entwickelte Lösung beschleunigt die Markteinführung für die Kunden. Diese sparen außerdem Entwicklungskosten für die Integration, indem sie eine Komplettlösung mit fertigen Komponenten verwenden.
Anup Sable, Mitglied des Vorstands und Chief Technology Officer, KPIT Technologies sagt: „Wir freuen uns über die Zusammenarbeit mit dSPACE und Microsoft. Das Mobilitätsökosystem braucht robuste Lösungen, die Fachwissen aus verschiedenen Bereichen nutzen. Bei KPIT ist unsere Expertise in der Software-Entwicklung, unsere praktische Erfahrung aus mehreren ADAS/AD-Produktionsprogrammen sowie unser starker Fokus auf die virtuelle Validierung der Schlüssel. Wir gehören zu den größten Software-Integrationspartnern und bieten Simulation as a Service (SimaaS) für mehr als zwölf große OEMs und mehr als vier Tier-1-Unternehmen. Unsere Erfahrung aus gemeinsamen Projekten mit dSPACE und unsere Microsoft-Expertise werden einen soliden Mehrwert für unsere Kunden schaffen.“
Tino Schulze, Executive Vice President Automated Driving & Software Solutions bei dSPACE erklärt: „Die Einführung und der Betrieb einer datengetriebenen Entwicklungs- und Validierungswerkzeugkette ist für unsere Kunden sehr aufwendig. Diese Zusammenarbeit ermöglicht die rasche Einführung von Tools sowie von technischem und Cloud-Know-how, um eine vollständige End-to-End-Lösung bereitzustellen. Dies erhöht die Entwicklungsgeschwindigkeit erheblich, was in diesem schnelllebigen ADAS/AD-Markt von entscheidender Bedeutung ist.“
Dwayne Crocker, Industry Solutions Director for Autonomous Development bei Microsoft, ergänzt: „Die Kombination der Microsoft-Azure-Hyperscale-Infrastruktur und Cloud-Services mit den Dienstleistungen und der Branchenerfahrung von KPIT und dSPACE ermöglicht eine nahtlose Entwicklung und Validierung von ADAS/AD-Funktionen auf globaler Ebene für unsere Automobilkunden.“
Über dSPACE
dSPACE ist ein weltweit führender Anbieter von Simulations- und Validierungslösungen für die Entwicklung vernetzter, selbstfahrender und elektrisch angetriebener Fahrzeuge. Die End-to-End-Lösungen des Unternehmens werden insbesondere von Automobilherstellern und ihren Zulieferern genutzt, um die Software- und Hardware-Komponenten ihrer neuen Fahrzeuge zu testen, lange bevor ein neues Modell auf die Straße kommt. Nicht nur in der Fahrzeugentwicklung ist dSPACE ein gefragter Partner, auch in der Luft- und Raumfahrt sowie in der industriellen Automatisierung vertrauen Ingenieure auf unser Know-how. Unser Portfolio reicht von End-to-End-Lösungen für Simulation und Validierung über Ingenieur- und Beratungsdienstleistungen bis hin zu Schulungen und Support. Mit mehr als 1.900 Mitarbeitern weltweit ist dSPACE in Paderborn und drei Projektzentren in Deutschland sowie durch Landesgesellschaften in den USA, Großbritannien, Frankreich, Japan, China, Korea und Kroatien vertreten.
KPIT ist ein globales Technologieunternehmen mit Software-Lösungen, die der Mobilität auf dem Weg in eine autonome, saubere, intelligente und vernetzte Zukunft helfen. Mit mehr als 6000 Mitarbeitern weltweit, die sich auf eingebettete Software, künstliche Intelligenz und digitale Lösungen spezialisiert haben, ermöglicht KPIT seinen Kunden, die Implementierung von Mobilitätstechnologien der nächsten Generation zu beschleunigen. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem im Wandel befindet. Weitere Informationen finden Sie unter www.kpit.com.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
Harmonisierung von Cybersecurity mit Safety and System Engineering
Die UNECE WP.29-Verordnung R155 für Cybersecurity-Managementsysteme (CSMS) ist in der Europäischen Union verpflichtend. R155 empfiehlt, die Anforderungen an das CSMS anhand von Normen wie der kürzlich veröffentlichten ISO/SAE 21434 umzusetzen. Es gibt weitere verbindliche oder empfohlene Normen und bewährte Verfahren zur Gewährleistung der Cybersecurity in der Automobilindustrie, beispielsweise ASPICE.
Ein systematischer Prozess und Methoden für die Entwicklung einer Automobilplattform und von Steuergeräten tragen dazu bei, die gesetzlichen Anforderungen zu erfüllen, die verschiedenen Sicherheitsstandards im Automobilbereich einzuhalten und die angestrebten Sicherheitsstufen für die Cybersecurity zu erreichen.
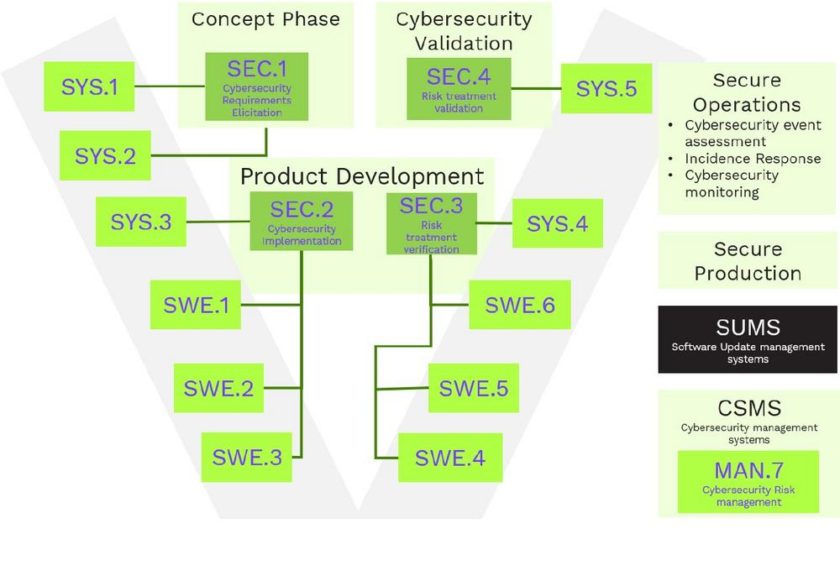
Dabei wird dem klassischen VEngineering-Modell gefolgt und der ASPICE-Security-Engineering-Prozess und -Gruppen integriert. Für den Nachweis und die Bewertung der kritischen Phasen des CSMS werden Arbeitsergebnisse gemäß ISO/SAE 21434 erstellt.
Eine Reihe von Cybersecurity-Aktivitäten, die über die Serienproduktion hinausgehen, werden durchgeführt, um neu entdeckte Schwachstellen zu erkennen und zu beheben. Als Teil des Vorgehensmodells wird die Integration des Security-Prozesses in den Safety-Prozess skizziert, um die Wahrscheinlichkeit von fehlenden Themen zu Beginn der Entwicklung zu reduzieren.
Die Durchführung einer Bedrohungsund Risikoanalyse (Threat Analysis and Risk Analysis, TARA) ist ein iterativer Prozess, und sollte erst beendet werden, wenn die Anlagen ausreichend gegen Bedrohungen und gegen elektrische oder elektronische Komponenten geschützt sind. Mit dem Prozessmodell kann die iterative TARA nahtlos mit anderen Prozessmodellen integriert werden. Verschiedene Themen wie autonomes Fahren, V2X-Konnektivität, Elektrifizierung und Shared Mobility wirken sich auf die Fahrzeugsicherheit aus. UNECEBestimmungen, Standards wie ISO/ SAE 21434, ASPICE und andere bestehende Standards für die Cybersicherheit im Automobilbereich regulieren und leiten die Entwicklung und Sicherung von Fahrzeugen.
Die gesamte Wertschöpfungskette, einschließlich der Automobilhersteller (OEMs) und der -Zulieferer auf allen Ebenen, muss die Vorschriften der UNECE R155 und R156 einhalten. OEMs sind juristische Personen, die sich für CSMS- und SUMS-Audits registrieren lassen müssen. OEMs müssen sicherstellen, dass ihre Partner in der Wertschöpfungskette Cybersicherheitspraktiken befolgen und umsetzen.
Trotzdem wird dringend empfohlen, ISO/SAE 21434 und ISO 27001 für Cybersicherheit und ISO/CD 24089 für Software-Update-Engineering zu befolgen. Auf welche Weise können Cybersecurity-Engineering-Aktivitäten in ASPICEbasierte Entwicklungszyklen integriert werden? In den folgenden Abschnitten wird ein ganzheitlicher Ansatz für die Cybersecurity in der Automobilindustrie skizziert.
Überblick über den Prozess
Im Folgenden wird ein integriertes Prozessübersichtsdiagramm für die Entwicklung eines sicheren Kfz-Steuergeräts dargestellt. Die Aufnahme von Cybersicherheitsaktivitäten für ein Projekt erfordert ein etabliertes Cybersecurity-Managementsystem (CSMS) gemäß ISO/SAE 21434, Absatz 05, und ein Software-Update-Managementsystem (SUMS) gemäß ISO/CD 24089. Das CSMS muss Cybersecurity-Richtlinien, Regeln, Kompetenzmanagement für Ressourcen, kontinuierliches Management, Toolmanagement und Prozesse definieren. Das SUMS muss auch den notwendigen Prozess spezifizieren, um Rückverfolgbarkeit, Konsistenz, einen eindeutigen Identifikator, Interdependenz und Kompatibilität während des Software-Aktualisierungsprozesses sicherzustellen (Bild 1).
Für die Entwicklung und Produktion von Automotive-Steuergeräten müssen eine Hochsicherheitseinrichtung zum Schutz sensibler Daten sowie eine Infrastruktur und Verfahren eingerichtet werden. Das lässt sich als Teil eines CSMS auf Organisationsebene handhaben. Die nachfolgenden Abschnitte behandeln projektspezifische Cybersecurity-Aktivitäten, die parallel zu anderen Produktentwicklungsaktivitäten durchgeführt werden müssen, um die gesetzlichen Anforderungen zu erfüllen, die Industriestandards für die Sicherheit in der Automobilindustrie einzuhalten und das angestrebte Sicherheitsniveau für die Cybersecurity zu erreichen.
Planung
Der projektabhängige Plan für Cybersecurity-Aktivitäten und die Verantwortlichkeiten müssen gemäß ISO/SAE 21434, Abschnitt 06, festgelegt werden. Die Kontrolle und der Plan müssen sicherstellen, dass der Lieferant alle Vorschriften und Normen zur verteilten Entwicklung einhält. Innerhalb des projektspezifischen CSMS müssen Cybersecurity- Fälle eröffnet werden, um die Arbeitsergebnisse zu verfolgen, zu aktualisieren, während des Projekts zu überprüfen und mit einem Bewertungsbericht abzuschließen, bevor die Produktion freigegeben wird. Der in ASPICE definierte Prozess des Cybersecurity-Risikomanagements kann als Teil des CSMS betrachtet werden. Das CSMS muss Aktivitäten im Zusammenhang mit der Produktionsund Betriebssicherheit begrenzen. Für Software-Updates muss SUMS befolgt werden.
Konzeptphase
Die Entwicklung von Cybersecurity beginnt mit der Konzeptphase, in der die Sicherheitsanforderungen (Bild 2) ermittelt werden. Die Aktivitäten müssen gemäß ISO/SAE 21434, Abschnitt 09, durchgeführt werden und sind dem in ASPICE definierten SEC.1-Prozess ähnlich. In der Konzeptphase wird die Bedrohungsanalyse für ein Element, ein Bauteil oder ein Set durchgeführt, das eine Funktion auf Fahrzeugebene implementiert. Er lässt sich zusammen mit dem SYS.1-Prozess ausführen. Danach können die Prozesse SYS.2 und SYS.3 folgen. Der ASPICE-SYS.3-Prozess kann zum Einsatz kommen, um die Architektur für Cybersecurity-Systemelemente auf Grundlage der Systemanforderungen zu bestimmen.
Die Risikobewertung für Cybersecurity (TARA) lässt sich mit verschiedenen Methoden durchführen. Ein EVITA- oder STRIDE-Modell (E-Safety Vehicle Intrusion Protected Applications) kann zur Bewertung der Sicherheit in der Konzeptphase zum Einsatz kommen. Die Modellierung und Bewertung kann mit dem Microsoft Thread Modeling Tool mit einer auf die Automobilindustrie zugeschnittenen Vorlage durchgeführt werden.
Die Ziele der Cybersecurity und der funktionalen Sicherheit können manchmal im Widerspruch stehen, zum Beispiel stellt das Cybersecurity-Ziel den Dienst sicher. Das Safety-Ziel besteht darin, ein System oder eine Funktion abzuschalten, wenn eine gefährliche Situation festgestellt wird. Daher ist eine Interaktion zwischen Cybersecurity und funktionaler Sicherheit erforderlich, und die von TARA und HARA ermittelten Risiken und Pläne zur Risikominderung müssen von dem gemeinsamen Team überprüft und entsprechend aktualisiert werden.
Produktentwicklung: Design
ISO/SAE 21434, Abschnitt 10, definiert die Produktentwicklung für Cybersecurity. Der Prozess kombiniert Aktivitäten und Umfang der ASPICE-Prozesse SEC.2 und SEC.3. Nach Abschluss der Konzeptphase und dem Beginn des System-Engineerings besteht der nächste Schritt in der Entwicklungsphase darin, die Risiken in den Systemelementen zu analysieren. Die Cybersecurity-Spezifikation für ein Systemelement, die Anforderungen und eine Architektur enthält, ist die primäre Eingabe. Der Prozess würde die Systemarchitektur aktualisieren und verfeinern und die Spezifikationen für die nächste Stufe der Cybersecurity-Komponenten festlegen. Eine in der Konzeptionsphase gewählte Risikominderungsmaßnahme kann neue Werte einführen, die geschützt werden müssen. Daher ist eine Bedrohungsanalyse auf Grundlage von Stride oder einer ähnlichen Methode erforderlich, um Risiken in dem entwickelten System zu ermitteln.
Bild 3 zeigt ein Standardverfahren zur Ermittlung von Risiken und zur Entwicklung von Spezifikationen für Cybersecurity-Komponenten. Wenn die Produktentwicklung fortschreitet und Spezifikationen für Software- und Hardware- Komponenten entwickelt werden, ist eine Bedrohungsanalyse möglicherweise nicht mehr erforderlich, wohl aber eine Schwachstellenanalyse. Ebenso kann der Synchronisierungsprozess für die Sicherheit entfallen, wenn die Systemabstraktion auf der Ebene der Einheiten erfolgt.
Produktentwicklung: Verifizierung
Bild 4 zeigt verschiedene Verifizierungsaktivitäten, um zu bestätigen, dass die Implementierung und Integration der Komponenten den verfeinerten Cybersecurity-Anforderungen und dem Architektur-Design entspricht. Der Prozess und die Aktionen sind der ASPICESEC. 3-Prozessdefinition ähnlich. Die Verifizierungsprozesse für Software-, Hardware-, System- und Objektintegration müssen eingehalten werden.
Validierung
Die Cybersecurity-Validierung nach ISO/ SAE 21434 konzentriert sich auf die Elementebene. Die Prozessziele sind die gleichen wie bei ASPICE SEC.4. Es müssen eine Reihe von Validierungsmaßnahmen durchgeführt werden, um zu bestätigen, dass die Cybersecurity-Ziele und -Ansprüche erfüllt wurden. Wie in Bild 5 dargestellt, führt KPIT im Rahmen des Fahrzeugprojekts verschiedene Validierungsaktivitäten durch.
Produktion
Ein Cybersecurity-Fall und ein Bewertungsbericht müssen vor Beginn der Produktion fertig sein. Die Produktionskontrollpläne müssen gemäß ISO/ SE 21434, Abschnitt 12, erstellt werden und Anweisungen zur Installation der Ausrüstung enthalten, damit keine unbefugten Änderungen vorgenommen werden können.
Sichere Abläufe
Cybersecurity ist auch außerhalb der Serienproduktion ein Thema. Neu aufgedeckte Schwachstellen müssen behoben werden. Für diese Stufe gilt ISO/SAE 21434, Abschnitt 13. Zu den Aktivitäten gehören die Aktualisierung der öffentlich zugänglichen Schwachstellendatenbank, der Abgleich neu entdeckter Schwachstellen mit der Produktfunktionalität / dem Produktdesign und gegebenenfalls eine Risikobewertung für alle Design-Änderungen oder neu entdeckten Schwachstellen. Es ist wichtig, interne und externe Quellen zu überwachen, nach definierten Auslösern zu sortieren und Cybersicherheitsereignisse zu analysieren.
Schlussfolgerung
Infolge der neuen Vorschriften ist Cybersecurity keine Option mehr. Sie ist wie die funktionale Sicherheit obligatorisch. Ein Prozessmodell für die Cybersicherheit kann in Übereinstimmung mit verschiedenen Normen und egulatorischen Anforderungen erstellt werden. Dieses fügt sich nahtlos in andere damit verbundene Entwicklungsaktivitäten ein und trägt dazu bei, Redundanz und Verwechslung zu vermeiden.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
Architektur eines integrierten Ein- und Ausparksystems
Als automatisiertes System ist ein Parksystem sicherheitskritisch und weniger komplex bei hohen Ge- schwindigkeiten auf der Autobahn oder in Stauszenarien. Seine Präzision bei der Positionierung des EgoFahrzeugs und der Orientierung in Abhängigkeit vom Parkplatz und benachbarten abgestellten Fahrzeugen stellt jedoch angesichts der Verwendung kostengünstiger Sensoreinrichtungen für die Erfassung und Lagebewertung eine große Herausforderung dar. Die Automatisierung des Parksystems umfasst die Präzision beim freihändigen Einparksystem und Ausparkmanöver des vorübergehend abgestellten Fahrzeugs und ruft auf Befehl des Fahrers über HMI, Tablet oder externe Schnittstellen ein freihändiges Ausparkmanöver des vorü- bergehend geparkten Fahrzeugs auf.
Konzeptdetails
Das Einpark- und Ausparksystem umfasst Sensorik und Erfassung, Modusund Statusverwaltung, Planung und Fahrzeugbewegungssteuerung. Bei den meisten bestehenden Lösungen für Einparkysteme konzentrieren sich die Forscher auf die Komplexität der Wegplanungsgeometrie oder die Entwicklung eines präzisen Steuerungssystems für ein Parkassistenzsystem. Allerdings schaffen sie damit in den meisten Fällen eine Lücke auf Systemebene zwischen der Umwandlung des Datenflusses und der Erfassung des Betätigungssystems bei der Unterstützung erfolgreicher konventioneller Parkmanöver. Der vorliegende Artikel erörtert eine ganzheitliche Parkassistenzlösung zum Manövrieren des Fahrzeugs auf einem Parkplatz. Die räumlichen Beschränkungen des Parkplatzes erfordern oft ein Parksystem mit Mehrfachbetätigung, was die Komplexität der Wegplanung und Entscheidungskontrolle weiter erhöht. Der kombinierte Bewegungssteuerungsmechanismus aus Quer- und Längshilfen unterstützt beim Parkmanöver und bietet einen Vorteil gegenüber dem herkömmlichen Ansatz, das Fahrzeug mit konstanter Geschwindigkeit zu lenken.
Das Entwicklungskonzept des Parkassistenzsystems umfasst:
- Systemtechnik
- Anforderungsabweichung des Parkassistenzsystems
- Aufstellung einer Leistungskennzahldefinition für die Leistungsbewertung
Auf diese Schritte folgen Bauteilgestaltung, Modellentwicklung und Systemva lidierung. Die Architektur eines Einparkund Ausparksystems bestimmt grundsätzlich die Systemebenenabläufe des autonomen Fahrsystems. Konzept und Auslegung sind weitere Beiträge der Systemarchitektur auf Komponentenebene zur Unterstützung der Entwicklung und Modellimplementierung. Das entwickelte System wurde einer Prototypenevaluierung auf Simulationsebene unterzogen, mit Standard-Fahrzeugdynamik in der Schleife zur Sicherstellung der Robustheit und Leistung eines integrierten Ein- und Ausparkfeatures.
Architektur des Parkassistenzsystems
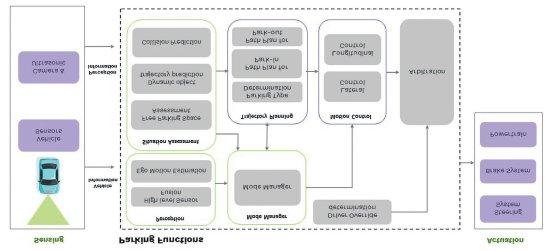
Das automatische Park-Feature nutzt oft den Mechanismus zur Feststellung der Verfügbarkeit von parallel und in Querrichtung liegendem Parkraum unter Verwendung kostengünstiger Sensoreinrichtungen, wie Ultraschall oder Kamerasensoren zur Positionierung des Hostfahrzeugs in der Parklücke mit Orientierung an benachbarten geparkten Fahrzeugen. Die Architektur auf der Systemebene des Ein- und Ausparksystems ist in Bild 1 dargestellt.
Die wesentlichen Attribute des Stands der Technik haben sich entweder auf die Komplexitäten der Wegplanung oder die Fahrzeugbewegungssteuerung für Parkmanöver konzentriert, wobei jedoch die End-to-End-Lösung eines Parkassistenzsystems mit Ausparkfunktion nicht berücksichtigt wird. Die umfassende Architektur eines integrierten Einparkens in Längs- und Querrichtung wird hiermit als Stand der Technik präsentiert und beinhaltet die ursprüngliche Vorwärtsbewegung zur Ausrichtung des Host-Fahrzeugs für das Einparkmanöver nach erfolgreicher Ermittlung des freien Platzes, gefolgt von einem Rücksetzmanöver zur Positionierung des Fahrzeugs in der ermittelten Parklücke. Darüber hinaus ist das Einpark-Feature mit der Ausparkfunktion verbunden. Der Benutzer kann das Ausparkmanöver nur über Tablet oder HMI einleiten, wenn eine voreingestellte Zeit nach dem erfolgreichen Einparken vergangen ist.
Logische Komponenten und Auslegung des Parkassistenzsystems
Die Systemarchitekturentwicklung bleibt eine integrale Aktivität im Entwicklungslebenszyklus und liefert einen systematischen Ansatz für eine automatisierte Feature-Entwicklung. Der Ein- und Ausparkassistent umfasst folgende Hauptfunktionen: Erfassung und Objektfusion, Situationsbewertung, Modusmanagement, Bahnplanung und Bewegungssteuerung an der Seite und in Längsrich tung. Die vorgeschlagene logische Architektur, die im Enterprise-ArchitectTool entworfen wurde (Bild 2), übertrifft das konventionelle modulare Konzept auf Software-Komponentenebene während der Design-Phase und erleichtert gleichzeitig den sequentiellen Datenfluss von den Eingangserfassungsmodulen zum Ausgabesystem.
Die Erfassungsfunktion hilft bei der Einschätzung der Eigenbewegung und zusammengeführten Verkehrsattributen auf der Grundlage von Informationen der Kamera und der Ultraschallsensoren, während das Situationsbewertungsmodul die Ermittlung freier Stellplätze, die Bewertung von Fahrzeugen oder Fußgängern im dynamischen Verkehr und die Kollisionsvorhersage durchführt. Das Modul zur Bewertung freien Parkraums wertet dann die dynamische Bedrohungslage und die Einparkmöglichkeit aus, die in einem weiteren Zusammenhang mit der Bahnplanung und der Bewegungssteuerung für das Einparkmanöver steht. Die Bahnplanungsfunktion hilft bei der Erstellung des optimalen kollisionsfreien Weges für einzelne oder mehrfache Manöver auf der Grundlage der räumlichen Beschränkungen. Darüber hinaus gewährleistet die Bewegungssteuerung die Fahrzeugnavigation auf der vorgesehenen Parkbahn mit minimalen Positionierfehlern. Der Modusmanager steuert den Übergang zwischen den definierten automatischen Parkmodi und hilft des Weiteren bei der Bestimmung der Operationen von Funktionsmodulen bei Änderungen. Der Erfassungs- und Situationsbewertungsblock beobachtet und bewertet den erforderlichen Parkraum: die Bahnplanung zum Ein- und Ausparken und die Bewegungssteuerung bleiben bei erfolgreicher Bestimmung des erforderlichen Parkraums für das automatische Einparken oder einen kollisionsfreien Weg aktiviert, um den assistierten Ausparkvorgang zu initiieren.
Entwicklungsansatz des Ein- und Ausparkassistenzsystems
Die automatische Vorwärtsbewegung des Fahrzeugs, gefolgt von einem Rücksetzmanöver während der Nachverfolgung der geplanten Bahn vom Parkplatzgang zum Stellplatz basierend auf der Initiierung des automatischen Parkassistenten durch den Benutzer bleibt ein vorrangiger Bestandteil dieses Features. Zu dieser Feature-Entwicklung gehören Erfassungs- und Sensorfusion, Modusmanagement und Entscheidungssteuerung zur gleichzeitigen Lenkung sowohl der Längs- als auch der seitlichen Bewegungen des Hostfahrzeugs in einem assistierten Modus. Die Architektur des Parkassistenzsystems wird über einen modellbasierten Entwicklungsansatz in ein Feature-Modell übertragen. Die Modularität hat für ein entsprechendes Maß an Flexibilität bei der Auslegung und Anpassung für verschiedene Varianten von Betriebsattributen und Erfassungstopologien gesorgt. Die vorherrschenden Attribute des Feature-Entwicklungsprozesses bei der Bereitstellung einer Endto-End-Lösung für Anwendungsszenarien des assistierten Parkens sind folgende:
- Entwicklung der logischen Architektur, Ableitung der Anforderungen auf System- und Komponentenebene für ein Parkassistenzsystem aus der Benutzerspezifikation sowie kritischen Szenarien, wie in Bild 3 dargestellt
- Konzept-Design und Modellentwicklung des Park-Features im Zusammenhang mit dem Manövrieren im Vorwärts- und Rückwärtsgang
- Feature-Auswertung nach Automobilstandards und Funktionsanforderungen
Der Steuermechanismus für die Lenkungsbetätigung basiert auf dem Konzept der zusammengesetzten Nachführeinheit, bei dem die Längsbewegungssteuerung die Querbewegungsverfolgungsfunktion unterstützt. Längs- und Seitenbewegung sind gekoppelt und bleiben ein kritisches Element für das Parksystem. Das ermöglicht die präzise Verfolgung einer geplanten Bahn bei einem Rücksetzmanöver im Einparksystem und hilft so bei der genauen Positionierung des Host-Fahrzeugs im Parkraum mit Ausrichtung an benachbarten geparkten Fahrzeugen. Das Konzept der zusammengesetzten Bewegungssteuerung erfordert eine zeitbasierte Nachverfolgung von Wegpunkten auf der Bahn und trägt den Einschränkungen der Systemdynamik beim Parkvorgang Rechnung. Die Leistungskennzahlen einer automatischen Einparkfunktion werden oft anhand eines dynamischen Standardfahrzeugmodells in einer Schleife validiert, um die Robustheit des Systems sicherzustellen. Die Modularität der Architektur bietet die Möglichkeit, die Komponenten der geplanten Bahn für das Rückwärtseinparken einzusetzen, um ein kollisionsfreies Ausparken mit Vorwärtsbewegung zu unterstützen, sofern die Umgebung unverändert bleibt und Bewegungen benachbarter Objekte die Route des Ausparkmanövers nicht beeinflussen. Situationsbewertung, Modusmanager und Übersteuerungsbestimmung des Fahrers bleiben auf ähnliche Weise sowohl für den Einpark- als auch für den Ausparkvorgang funktionsfähig. Das verschafft einen Vorteil gegenüber dem konventionellen Ansatz.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
KPIT und ZF bilden eine Entwicklungskooperation für eine branchenführenden Middleware-Lösung
- Schließt die große Lücke bei der Verfügbarkeit einer ausgereiften, modularen, integrierten Middleware-Lösung, die es Mobilitäts-OEMs ermöglicht, die kontinuierlich wachsende Softwarekomplexität zu bewältigen und gleichzeitig die volle Kontrolle über die Architektur zu behalten.
- Basiert auf nachhaltige Investitionen von KPIT und ZF in Lösungen für "software-definierte Fahrzeuge".
- Durch die gemeinsame Entwicklung wird eine offene und skalierbare Plattform geschaffen, die von OEMs und Mobilitätskunden genutzt werden kann.
KPIT Technologies, ein führender unabhängiger Softwareentwicklungs- und Integrationspartner für die Automobil- und Mobilitätsindustrie, und die ZF Group, ein weltweit tätiges
Technologieunternehmen, das Systeme für PKW, Nutzfahrzeuge und Industrietechnik liefert, gaben bekannt, dass sie bei der Entwicklung einer branchenführenden Middleware-Lösung für das Mobilitäts-Ökosystem zusammenarbeiten werden.
Die stetig steigende Softwarekomplexität in Verbindung mit einer Hochleistungs-Computing-Infrastruktur erfordert eine robuste und zuverlässige Middleware-Lösung. Das Fehlen einer solchen Lösung kann die Fahrzeugentwicklung möglicherweise verzögern und die Technologieausgaben in die Höhe treiben.
Mit dem Software-Know-how von KPIT und dem fundierten Wissen von ZF über Fahrzeugsysteme entsteht eine ausgereifte, modulare Middleware-Lösung, die OEM-übergreifend eingesetzt werden kann und eine große Chance für das Mobilitäts-Ökosystem darstellt. Diese Kooperation bringt auch Lösungen anderer Technologieunternehmen an Bord, darunter Halbleiterspezialisten, Softwareunternehmen, Cloud-Dienste und Start-ups.
Die Middleware-Entwicklung wird auf die Erfahrung von KPIT in mehreren Produktionsprogrammen, die Expertise in Architekturberatung & Softwareintegration und seine Stärken bei Cloud-basierten vernetzten Diensten zurückgreifen und wird bestehenden Assets, Tools und Accelerators von KPIT sowie andere Kerninfrastrukturen nutzen.
Kishor Patil, CEO von KPIT Technologies, sagte: "Wir freuen uns sehr über die Zusammenarbeit mit ZF bei der Entwicklung einer branchenführenden Middleware-Lösung. Die OEMs sind an offenen und skalierbaren MiddlewareLösungen interessiert, die die Grundlage für die künftige Fahrzeuggeneration bilden und erhebliche Qualitäts- und Produktivitätsverbesserungen bringen können. Eine geeignete Middleware-Lösung hilft OEMs und unseren Mobilitätskunden beim Übergang zu einer soliden zentralen Computerarchitektur. Gemeinsam bringen wir Software-Know-how, Systemverständnis und Wissen über die Bedürfnisse von OEMs und Mobilitätskunden ein. Diese Entwicklungskooperation für Middleware-Lösungen wird unseren globalen Automobil- und Mobilitätskunden einen immensen Mehrwert bieten und die Entwicklungszyklen erheblich verkürzen."
"Die nächste Fahrzeuggeneration, die auf den Markt kommt, wird über elektrische Antriebe, einen hohen Automatisierungsgrad sowie Konnektivität verfügen und wird softwaredefiniert sein.", erklärt Dr. Dirk Walliser, SVP Corporate R&D, ZF Group. "Mit dem, was wir gemeinsam mit KPIT entwickeln, können wir unseren Automotive-Kunden noch umfassendere Softwarelösungen anbieten, die sich nahtlos in unser Systemportfolio für das softwaredefinierte Fahrzeug einfügen: High-Performance-Computing, Software, intelligente Sensoren und intelligente Aktoren."
Im Januar 2021 gründete ZF ein Global Software Center, das konzernweit für die Entwicklung von Softwaresystemen für zukünftige Architekturen zuständig ist. Ein Kernprodukt ist eine Automotive-Middleware, die als "Vermittler" zwischen dem Betriebssystem eines Fahrzeugcomputers und seinen Softwareanwendungen dient. Diese Entwicklung ist eng mit der Entwicklung von Anwendungssoftware für Mobilitätsbereiche wie automatisiertes Fahren, integrierte Sicherheit, Fahrzeugbewegungssteuerung und Elektromobilität verbunden.
Über ZF
ZF ist ein weltweit tätiges Technologieunternehmen, das Systeme für Pkw, Nutzfahrzeuge und Industrietechnik liefert und damit der nächsten Generation der Mobilität den Weg bereitet. ZF lässt Fahrzeuge sehen, denken und handeln. In den vier Technologiefeldern Vehicle Motion Control, Integrierte Sicherheit, Automatisiertes Fahren und Elektromobilität bietet ZF umfassende Produkt- und Softwarelösungen für etablierte Fahrzeughersteller und neu entstehende Verkehrs- und
Mobilitätsdienstleister. ZF elektrifiziert eine breite Palette von Fahrzeugtypen. Mit seinen Produkten trägt das Unternehmen dazu bei, Emissionen zu reduzieren, das Klima zu schützen und eine sichere Mobilität zu ermöglichen.
Im Geschäftsjahr 2020 erzielte ZF einen Umsatz von 32,6 Milliarden Euro. Das Unternehmen beschäftigt mehr als 150.000 Mitarbeiter an rund 270 Standorten in 42 Ländern.
Weitere Presseinformationen und Fotos finden Sie unter www.zf.com
KPIT ist ein führender unabhängiger Softwareentwicklungs- und Integrationspartner, der die Mobilität auf den Weg in eine saubere, intelligente und sichere Zukunft bringen will. Mit 7000 Automobelievers auf der ganzen Welt, die sich auf eingebettete Software, KI und digitale Lösungen spezialisiert haben, beschleunigt KPIT die Implementierung von Technologien der nächsten Generation für die zukünftige Mobilitäts-Roadmap. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Automobil- und Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem verändert. Weitere Informationen finden Sie unter www.kpit.com
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Global Head, Marketing, KPIT Technologies
Telefon: +91 (98811) 36726
E-Mail: mohit.kochar@kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
KPIT will verstärkt in softwaredefinierte Fahrzeuglösungen investieren mit besonderem Schwerpunkt auf Middleware
- OEMs bewegen sich immer schneller auf eine zentrale Compute-Architektur zu und investieren in erheblichem Umfang, um die Entwicklungszyklen zu verkürzen
- KPIT entwickelt und verbessert Middleware-Technologien sowie Infrastrukturen, um den Kunden den Weg zu softwaredefinierten Fahrzeugen zu ebnen
- Die bewährte Softwareintegrationsexpertise von KPIT in den Bereichen Autonome, Elektrifizierung, Karosserieelektronik und vernetzte Fahrzeuge, ergänzt durch Architekturberatung, integrierte Tools und Infrastruktur, wird für diese Initiative von entscheidender Bedeutung sein.
- KPIT wird darüber hinaus zusammen mit Partnern ein Ökosystem aufbauen, um integrierte Lösungen für softwaredefinierte Fahrzeuge zu entwickeln
KPIT Technologies Ltd, ein führender unabhängiger Softwareentwicklungs- und Integrationspartner für die Automobil- und Mobilitätsindustrie, gab heute bekannt, dass das Unternehmen erhebliche Investitionen tätigen wird mit besonderem Schwerpunkt auf Middleware-Lösungen, um die Umstellung der Kunden auf softwaredefinierte Fahrzeuge sowohl im Pkw- als auch im Nutzfahrzeugsegment zu beschleunigen.
Das Kundenerlebnis im Fahrzeug wird entscheidend durch die Software bestimmt. Es wird immer wichtiger, Hardware und Software zu trennen, und die OEMs müssen Softwarelösungen über den gesamten Fahrzeuglebenszyklus hinweg entwickeln, einsetzen und aktualisieren.
Die OEMs bewegen sich schneller als erwartet auf eine Central-Compute-Architektur zu. Das Automobil-Ökosystem bemüht sich verstärkt um den Aufbau einer robusten und zuverlässigen Softwareplattform, die verschiedene Bereiche wie autonomes Fahren/ADAS, digitales Cockpit, elektrischer Antriebsstrang und Karosseriesteuerungsmodule unterstützen kann.
KPIT beabsichtigt, Technologien und Infrastrukturen zu entwickeln und zu verbessern, um OEMs und Tier-1-Unternehmen bei dieser großen Transformation der Fahrzeugarchitektur zu unterstützen. Den neuen Herausforderungen will KPIT mit Lösungen in den Bereichen Softwareintegration, Architekturberatung, Integration von Plattformkomponenten, integrierte Werkzeuge und CI/CT/CD*-Infrastruktur begegnen, um OEMs dabei zu helfen, die Zusammenführung verschiedener Komponenten zu beschleunigen.
Die Art und Weise, wie Software erstellt, getestet und in Fahrzeugen eingesetzt wird, wird sich erheblich verändern und global verteilte Teams sowie neue Sicherheitsstandards für die Cybersicherheit und die Sicherheit autonomer Fahrzeuge erfordern. Investitionen werden in der nahen Zukunft weiter erhöht, um spezifische Lösungen und Fähigkeiten zu entwickeln, die den sich ändernden Bedürfnissen entsprechen.
KPIT bietet heute ein breites Spektrum an technischen Lösungen an und verfügt über reiche Erfahrung bei der Unterstützung verschiedener Produktionsprogramme für seine Mobilitätskunden. Die neuen Investitionen von KPIT in Full-Service-Fähigkeiten, Plattformen, Tools und Beschleuniger ergänzen die bestehenden Software-Integrationskapazitäten in den Bereichen Autonomes Fahren, elektrischer Antriebsstrang, Connected Vehicle, Karosserieelektronik, AUTOSAR, Diagnose und OTA. Darüber hinaus arbeitet KPIT proaktiv mit seinen Partnern zusammen, um ein Ökosystem zu entwickeln und integrierte Lösungen zu schaffen, die OEMs und Tier 1s dabei helfen, ihren Transformationsprozess zu beschleunigen.
Kishor Patil, CEO von KPIT Technologies, sagt zu diesem wichtigen Meilenstein: „Das Hauptziel von KPIT bei dieser Schwerpunktsetzung ist es, unseren Kunden einen schnellen und nahtlosen Übergang zu einer Central-Compute-Architektur zu ermöglichen. Unsere Plattformen, Tools, Beschleuniger und Methoden bieten die Geschwindigkeit, die Bandbreite und die Unabhängigkeit, die OEMs benötigen. Wir freuen uns auf die Zusammenarbeit mit Partnern, um einen Beitrag für das Ökosystem zu leisten und den Übergang um mindestens ein Jahr zu beschleunigen.“
*CI/CT/CD – Continuous Integration/Continuous Testing/Continuous Delivery (Kontinuierliche Integration/kontinuierliche Prüfung/kontinuierliche Bereitstellung)
KPIT ist ein führender unabhängiger Softwareentwicklungs- und Integrationspartner, der die Mobilität auf den Weg in eine saubere, intelligente und sichere Zukunft bringen möchte. Mit 7000 Automobelievers auf der ganzen Welt, die sich auf eingebettete Software, KI und digitale Lösungen spezialisiert haben, beschleunigt KPIT die Implementierung von Technologien der nächsten Generation für die zukünftige Mobilitäts-Roadmap. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Automobil- und Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem wandelt. Weitere Informationen finden Sie unter www.kpit.com
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()

Verdeckte Schwachstellen erkennen und ausmerzen
Heutzutage integriert die Automobilindustrie zahlreiche neue Funktionen in vernetzte Fahrzeuge, und es gibt eine zunehmende Interaktion zwischen verbundenen ECUs über bordeigene Kommunika tionsprotokolle. Dieser enorme Datenfluss muss im Sicherheitskontext validiert werden, um zu überprüfen, ob irgendwelche potenziellen Schwachstellen zu Beeinträchtigungen bei Kernfunktionen führen können. Um diese Echtzeit-Schwachstellen über das CANUDS-Protokoll zu finden, wird ein Black-Box-Fuzz-Testing-Ansatz genutzt. Die zentrale Idee beim Fuzzing ist die Entwicklung eines Fuzzers. Er besteht aus einer positiven Testsuite sowie veränderten Kriterien und Fuzzing-Kriterien. Zudem generiert und liefert er ungültige Eingaben an das zu testende System (SUT). Das Verhalten des SUT wird überwacht und Anomalien werden gemeldet.
Mit Fuzzing lassen sich Schwachstellen an verschiedenen Schnittstellen und Steuergeräten (Electronic Control Units, ECUs) auffinden. Der Prozess umfasst das Abrufen der IDs und Sitzungen vom SUT, um das Fuzzing durchzuführen. Anschließend wird eine positive Testsuite mit gültigen CAN-Nachrichten erstellt. Die gültigen Eingabeaufforderungen werden weiter verändert, dem SUT werden veränderte Eingaben vorgelegt, und seine Reaktionen werden auf Abstürze oder Unterbrechungen analysiert. Durch ungültige Eingaben an das System wird das Verhalten der ECU beobachtet. Auf diese Weise werden fehlerhafte Antworten der ECU gefunden und gemeldet. Diese Anfragen und Antworten werden in einer Datei gespeichert und analysiert.
UDS – ISO 14229
Der Standard Unified Diagnostic Services (UDS), auch als ISO 14229 [1] bekannt, ist eine in Straßenfahrzeugen verwendete Anwendungsprotokollschnittstelle für die Diagnose, Fehlerbehebung und Konfiguration von ECUs. UDS definiert, wie Nachrichten zu formatieren sind, nicht jedoch, wie sie zu implementieren sind – obwohl der Standard einige bewährte Verfahren vorschlägt. Daher handelt es sich um eine Schnittstelle. Bild 1 zeigt die Struktur und die Arten von Diagnosemeldungen. Der UDSClient ist im Allgemeinen ein an einen Fahrzeugdiagnose-Port anzuschließendes Prüfgerät. Der UDS-Server ist im Allgemeinen ein Gerät oder eine elektronische „Name of ECU“-Steuereinheit (ECU) im Fahrzeug, die mit dem CANBus verbunden ist – zugänglich über den Diagnose-Port.
Jede Funktion des Standards ist innerhalb des Konzepts eines Dienstes gruppiert. Ein Dienst ist eine Anfrageart, die einige Parameter aufweist. Hier einige Beispiele, wie Funktionen in Service-Kennungen gruppiert sind:
- ECU Reset – 0x11
- Diagnostic Session Control – 0x10
- Tester Present – 0x3E
- Read Data by identifier – 0x22
Diese Services können spezifische Unterfunktionen aufweisen. So hat zum Beispiel der Dienst „ECU Reset“ eine Unterfunktion, die die Art der Rücksetzung beschreibt, die der Client durchführen möchte. Das kann ein harter Reset (Einschaltzyklus) oder ein softer Reset (Neustart der Firmware) sein. Die Unterfunktion ist das erste Byte der Dienstnutzlast, und ihr Wert wird durch UDS definiert. Wie der Server eine Rücksetzung auslöst, wird nicht von UDS definiert und bleibt dem Server-Programmierer überlassen.
Beim Herstellen einer Verbindung mit einem Server verfügt der Client über eine Sitzung und eine Sicherheitsstufe. In der Voreinstellung weist der Server den Client der „Standardsitzung“ zu, in der nur einige wenige spezifische Dienste zugänglich sind, wie etwa das Auslesen der Diagnosefehler-Codes (DTCs). ISO 14229 definiert vier Sitzungstypen und definiert die Liste der verfügbaren Dienste – aber nur für die Standardsitzung. Mit anderen Worten, der ECU-Hersteller entscheidet, welche Dienste für jede Sitzung verfügbar sind, mit Ausnahme der Standardsitzung. Ein Client kann mit dem Dienst Diagnostic -SessionControl ohne Einschränkungen auf jede Sitzung wechseln. Der ECUHersteller kann 32 zusätzliche Sitzungen definieren.
Die Sicherheitsstufe ist ein Status, den der Client durch Freischalten von Funktionen im Server mittels Sicherheitsschlüssel erreicht. Die UDS-Auslegung erlaubt bis zu 64 Sicherheitsstufen, die letztendlich im Server gesetzte Boolesche Flags sind. Diese Sicherheitsstufen und was sie freischalten, wird nicht von UDS definiert, sondern vom Hersteller der ECU. Eine Sicherheitsstufe kann einen kompletten Dienst, eine Unterfunktion oder den Zugriff auf einen spezifischen Wert freischalten. So setzt zum Beispiel das Schreiben der Fahrgestellnummer (VIN) möglicherweise eine spezifische Sicherheitsstufe voraus, die sich von dem unterscheidet, was zum Schreiben der Höchstgeschwindigkeit oder zum Überschreiben der Fahrzeug-IOs erforderlich ist.
In der Standardsitzung ist das Freischalten von Sicherheitsstufen nicht zulässig. Um einige Privilegien zu gewinnen, muss der Client zunächst auf eine Nicht-Standardsitzung schalten, die den SecurityAccess-Dienst aktiviert. Nur dann kann der Client den Handshake ausführen, der die gewünschte Funktion freischaltet. Im Allgemeinen laufen erlangte Privilegien nach einem kurzen vom ECU-Hersteller definierten Zeitraum ab. Eine Keep-Alive-Nachricht hält die Sicherheitsstufe freigeschaltet und die Sitzung aktiv, wobei diese Keep-Alive-Nachrichten mit dem Dienst TesterPresent versendet werden.
Die zum Freischalten einer Sicherheitsstufe zu sendende Nutzlast ist nicht von UDS definiert: UDS definiert die Vorgehensweise beim Schlüsselaustausch. Dieser Prozess basiert auf zwei Anfrage/Antwort-Austauschvorgängen zwischen Client und Server. Er geht wie folgt vonstatten:
- Zunächst fragt der Client ein Seed an, um eine spezifische Sicherheitsstufe, die durch eine Nummer gekennzeichnet ist, freizuschalten. Dieses Seed ist im Allgemeinen ein Zufallswert, den der Client verwenden muss, um den Schlüssel zu berechnen. Damit soll verhindert werden, dass jemand den Nachrichtenaustausch des CAN-Busses aufzeichnet und sich dann Privilegien durch unbesehenes Zusenden der Aufzeichnungen verschafft. Kryptografisch gesehen ist das Seed eine Nonce zur Vermeidung von Replay-Angriffen.
- Sobald der Client das Seed erhält, muss er einen Schlüssel berechnen, indem er einen Algorithmus verwendet, der vom ECU-Hersteller definiert wurde und dem Server bekannt ist.
- Der Client sendet den Schlüssel dann an den Server, der Server überprüft ihn und wenn er zum Server-Wert passt, wird die Sicherheitsstufe freigeschaltet, und der Client erhält eine positive Nachricht.
Der Sicherheitsalgorithmus kann ein beliebiger Algorithmus sein. Der Mangel an Algorithmusdefinition im UDS-Standard lässt einigen Raum für gute Sicherheitskonzepte, aber auch für schlechte – es hängt ganz vom Hersteller ab. In der Tat nutzen einige Hersteller das Konzept „Sicherheit durch Verschleierung“, während sich andere für ein robusteres Pre-Shared-Key-Schema entscheiden.
Prozessablauf
Ziel dieses Experiments war die Verallgemeinerung des Fuzzer-Algorithmus, sodass er für alle ECUs zum Einsatz kommen kann, die UDS über CAN gemäß UDS-Protokoll nutzen [1]. Weil ein Black-Box-Fuzzing durchgeführt wird, bekommt man ein Grundverständnis des Systems. In der Erkundungsphase hat sich KPIT mit dem Systemverständnis beschäftigt. Darauf folgte die Erstellung einer positiven Testsuite auf der Grundlage der Ergebnisse der Erkundungsphase. Es wurde eine Änderung umgesetzt, und die Ausgaben wurden auf der Basis eines Satzes von Kriterien klassifiziert. Des Weiteren wird jede Phase des Fuzzings im Detail erläutert. Bild 2 stellt einen Fuzzing-Prozess dar.
Zu testendes System
Der Prozess begann mit der Identifizierung des UDS über CAN-Ports/OBD-IIPorts, gefolgt von einer Hardware-Konfiguration. Für diese wurde die korrekte Spannung bereitgestellt und das SUT unter Verwendung eines USB-2-CAN-Protokollkonverters mit dem Laptop verbunden. Um Kriterien, Überwachung, Veränderung und Analyse der Pakete festzulegen, wurden CAPL-Skripts entwickelt.
Erkundung
Für eine erfolgreiche Durchführung des Fuzzings (Bild 2) ist es sehr wichtig, die diagnostische Arbitrierungs-ID zu finden. Die Feststellung der Arbitrierungs-ID ist ein wichtiger Schritt zur Kommunikation mit der ECU per Diagnose über CAN. Dazu wurde ein CAPL-Skript zur Identifizierung der Arbitrierungs-ID entwickelt. Das CANoe-CAPL-Skript spielt mit dem 8-Byte-Datenfeld des CANFrames. Das Arbitrierungs-ID-Feld der Reihe wird nach auf bis zu 11 Bit für den Standard-CAN-Frame geändert – dabei bleiben andere Datenfelder konstant. Auf ähnliche Weise werden die in den ECUs implementierten Dienste, die Dienst-IDs und die Unterfunktions-IDs festgestellt.
Positive Testfallgenerierung und Definition von Fuzzing-Kriterien
Zu diesem Schritt gehört die Erstellung gültiger UDS-Anfragen. Zu diesem Zweck wurde der UDS-Protokollstandard [1] und den UDS über CAN-Standard [2] untersucht. Damit werden Unified-Diagnostic-Services-Anforderungen für die Anwendungsschicht definiert. Diese ISO wurde untersucht und man hat eine positive Testsuite erstellt. Die positive Testsuite wird automatisch vom Fuzzer generiert. Der Algorithmus generiert automatisch eine positive Testsuite, mit der das Verhalten der ECU beobachtet und Fuzzing-Kriterien definiert werden.
Systematische Veränderung in CAN-Paketen
Mutationsbasiertes Fuzzing ist ein effektiver Ansatz zur Verbesserung der Sicherheit und Zuverlässigkeit von Protokollimplementierungen. Der Änderungsbasierte Fuzzer arbeitet mit gültigen Daten und wendet zufällige Veränderungen darauf an. Mit dieser Technik lässt sich tief in die Nachrichtenverarbeitung am Ziel eindringen. Die gültige Eingabeaufforderung wird verändert. Veränderte Eingaben werden dem SUT vorgelegt und die Reaktionen des SUT werden auf Abstürze oder Unterbrechungen analysiert. Durch ungültige Eingaben an das System wird das Verhalten der ECU beobachtet. Auf diese Weise werden fehlerhafte Antworten der ECU gefunden und gemeldet. Diese Anfragen und Antworten werden in einer Datei gespeichert und analysiert. Während der Analyse wird eine generierte Liste anfälliger Nachrichten hervorgehoben. Ein Nachrichtenlängen-Byte, ein Unterfunktions- Byte mit und ohne gesetztem SPR-Bit und ein Datenlängencode (DLC) wurden verändert. Ebenso wurden Änderungen an Diensten ohne Unterfunktion durchgeführt. Dieser Prozess wird auf Dienste sowohl in Standard- als auch in Nicht-Standardsitzungen angewendet. Der Grund dafür ist, dass einige Dienste in Standardsitzungen und einige in Nicht-Standardsitzungen implementiert sind.
Versuchsaufbau
Die Einrichtung besteht aus dem zu testenden System (SUT). Bild 3 zeigt einen Versuchsaufbau für das Fuzzing. Damit wurde ein Fuzzing an mehreren ECUs von Drittanbietern durchgeführt. Das SUT ist mit der Vector-CAN-Schnittstelle verbunden. Diese ist an den PC angeschlossen, der als Prüfgerät fungiert. Die Fuzzer-Skripts werden mit CANoe-CAPL auf dem PC ausgeführt.
Datenanalyse-basierte Algorithmen
Am Ende des Fuzzing-Prozesses wird eine Liste von Sicherheitslücken erstellt, bei denen es sich um Antworten handelt, die weder negativ noch positiv gemäß ISO 14229–1 sind. Das wird durch Entwicklung Datenanalyse-basierter Algorithmen für das Berichtsmodul erreicht. Der Algorithmus wendet Datenanalysetechniken auf die positive Testsuite und ECU-Antwort an, um Anomalien festzustellen, die dann in einer Excel-Tabelle berichtet werden. Alle gültigen Antworten werden ebenfalls protokolliert, und die Anomalien werden hervorgehoben. Bild 4 zeigt die gelb hervorgehobenen Anomalien. Der Bericht besteht aus Arbitrierungs-ID, Sitzungen, der mutierten Nutzlast und dem DLC sowie dem Ergebnis. (eck)
Quellenverzeichnis
[1] Straßenfahrzeug – Einheitliche Diagnosedienste (UDS) ISO 14229–1, ISO 14229–1, 2013.
[2] Straßenfahrzeuge – Diagnosekommunikation über Controller Area Network (DoCAN) – ISO 15765 Teil 2, 2004.
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
KPIT als Leader gelistet in der Everest Group PEAK-Matrix Bewertung für autonome, vernetzte, elektrische und shared mobility (ACES) Automotive Engineering Services 2021
- Das Leader-Ranking ist Audruck der weitreichenden Visionen und Fähigkeiten von KPIT und seiner Marktstellung
- Die Bewertung umfasste 23 Unternehmen aus der Mobilitätsbranche, die als Leader, Hauptakteure oder Aspiranten eingestuft wurden
- Die Leader-Bewertung unterstreicht unsere Vision, die Mobilität für eine sauberere, intelligentere und sicherere Welt zusammen mit dem Ökosystem neu zu denken und zu gestalten
KPIT Technologies, führender unabhängiger Softwareentwicklungs- und Integrationspartner für die Automobil- und Mobilitätsindustrie gibt bekannt, dass es in der PEAK-Matrix-Bewertung der Everest Group für autonome, vernetzte, elektrische und shared mobiliy (ACES) im Bereich Automotive Engineering Services 2021 als Leader klassifiziert wurde.
Dieses jährliche Assessment durch die Everest-Gruppe bewertet globale Engineering-Unternehmen objektive nach der Gesamtfähigkeit und Marktbedeutung. KPIT ist unter den 23 in dieser Studie bewerteten globalen Engineering-Unternehmen als Leader eingestuft worden.
Gewürdigt wurde bei der Bewertung die Vision und die Umsetzungsfähigkeiten von KPIT bei der weltweiten Implementierung der Technologien der nächsten Generation (ACES) für die Automobil- und Mobilitätsindustrie. KPIT arbeitet mit führenden Unternehmen der Mobilitätsbranche auf der ganzen Welt zusammen und sorgt für Skalierbarkeit und Verlässlichkeit bei der Entwicklung und Integration von Softwarefunktionen, um so die Softwareentwicklung vom Prototyp bis zur Produktion zu beschleunigen.
Die Bewertung hebt Bereiche und Domänen hervor, in denen KPIT mit Automobil-OEMs und Tier1-Unternehmen zusammenarbeitet wie z.b.: Autonomes Fahren und ADAS; Elektrifizierung und konventioneller Antriebsstrang; eCockpit und Konnektivität; gemeinsame Middleware für neue E/E-Architekturen (AUTOSAR, Cybersicherheit, OTA); Fahrzeugdiagnose und neue Fahrzeugtechnik und -design.
Sachin Tikekar, Präsident und Board Member, KPIT Technologies sagte: Wir fühlen uns geehrt und in unserer Arbeit bestärkt, dass wir in der PEAKMatrix- Studie der Everest-Gruppe als LEADER eingestuft wurden. Durch unseren Fokus auf Automotive und Mobility und die Zusammenstelllung verschiedener Bausteine in den letzten 20+ Jahren sind wir in einer idealen Position, um den Wandel zu begleiten und zu meistern. Die sorgfältige Studie und das Ranking der Everest-Gruppe geben ein klares Bild des MobilitätsÖkosystems und bieten einen guten Anhaltspunkt."
Akshat Vaid, Vice President der Everest Group, bemerkte: "KPIT hat seine globale Präsenz und Investitionen in Softwareentwicklungszentren an Standorten wie Pune, Bangalore, Detroit und München erfolgreich genutzt, um mit führenden OEMs und Tier-1-Unternehmen an ACES-Themen zu arbeiten. Sie haben starke Kompetenzen in den Bereichen Elektro- und Hybridantriebe, Ladesysteme und Leistungselektronik, Sensorfusion Algorithmen und assistiertes Fahren innerhalb der Elektromobilität und des autonomen Fahrens entwickelt. Das Unternehmen bietet Fähigkeiten in der Entwicklung von Embedded-Architekturen und Software-Stacks, ein zuverlässiges V&V-Setup und proprietäre Lösungen rund um HMI, Middleware-Komponenten, Konnektivität und autonome Plattformen. Der Kunde schätzt den Fokus von KPIT auf Qualität ohne Fehler bzw. minimale Nacharbeit sowie starke Projektmanagementfähigkeiten."
KPIT ist ein führender unabhängiger Softwareentwicklungs- und Integrationspartner, der die Mobilität auf ihren Weg in eine saubere, intelligente und sichere Zukunft unterstützt. Mit 7000 "Automobelievers" auf der ganzen Welt, die sich auf eingebettete Software, KI und digitale Lösungen spezialisiert haben, beschleunigt KPIT die Implementierung von Technologien der nächsten Generation für die zukünftige Mobilitäts-Roadmap. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Automobil- und Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem verändert. Weitere Informationen finden Sie unter www.kpit.com
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
KPIT tritt dem Autonomous Vehicle Computing Consortium bei, mit dem Ziel Erkenntnisse und Expertise bei der Softwareentwicklung für autonomes Fahren beizusteuern
- KPIT schließt sich mit führenden Unternehmen aus der Mobilitätsbranche zusammen, um Best Practices in die Entwicklung komplexer Software für autonomes Fahren einzubringen
- KPIT bringt umfangreiche praktische Erfahrungen in der Entwicklung von Produktionssoftware für autonomes Fahren mit
- Das Konsortium bemüht sich darum, die besten Lösungen für kritische Hardware- und Software-Plattformen zu finden
KPIT Technologies, ein führender unabhängiger Softwareentwicklungs- und Integrationspartner für die Automobil- und Mobilitätsindustrie, hat seinen Beitritt zum Autonomous Vehicle Computing Consortium™ (AVCC) bekanntgegeben. Dies ist Ausdruck unseres Bestrebens, gemeinsam mit anderen weltweit führenden Unternehmen der Mobilitätsbranche den Weg in die Zukunft des autonomen Fahrens anzuführen.
KPIT schließt sich führenden OEMs, Tier 1s und Halbleiterunternehmen wie GM, Toyota, Subaru, Veoneer, ARM, Bosch, NXP, Renesas als Mitglied des AVCC an, um gemeinsam mit ihnen an der Technologie für das autonome Fahren zu arbeiten.
AVCC ist ein globaler Zusammenschluss von führenden Automobil- und Technologieunternehmen, das sich auf computerbasierte Lösungen für automatisiertes und assistiertes Fahren konzentriert. Die Art und Weise, wie autonome Fahrlösungen entwickelt werden, ändert sich sowohl aus der Hardware- als auch aus der Software-Perspektive rasant. Die Rolle von Halbleitern, Middleware, Betriebssystemen und vor allem eingebetteter Software ist einem Wandel unterworfen. AVCC hilft, Unternehmen zusammenzubringen, die in diesem Bereich stark engagiert sind, um Lösungen für die Zukunft zu diskutieren und zu entwickeln.
KPIT arbeitet seit mehr als einem Jahrzehnt an der Entwicklung von Advanced Driver Assistance Systems (ADAS)/ Autonomous Driving (AD) und über 50 Fahrzeugproduktionsprogrammen und möchte seine wichtigen Erkenntnisse über Software-Architekturen, Plattformen und Komponenten diesem Konsortium zur Verfügung stellen.
Anup Sable, CTO, KPIT Technologies, sagte: „Wir sind seit vielen Jahren am Makrt aktiv und investieren seit über einem Jahrzehnt in ADAS- und ADSoftware- Kompetenzen. Deshalb haben zahlreiche OEMs und Tier 1 Unternehmen uns als strategischen Partner bei der Entwicklung autonomer Fahrzeuge der Zukunft ausgewählt. AVCC bietet uns ein großartiges Forum, um Einblicke zu geben und Erfahrungen auszutauschen, speziell im Bereich Software, Middleware und AUTOSAR."
Giuseppe Rosso, AVCC-Vorsitzender, sagte: „AVCC ist hocherfreut, KPIT im Konsortium begrüßen zu dürfen. Wir schätzen die Expertise von KPIT im Bereich ADAS/AD-Fahrzeuge sehr, und das Konsortium freut sich auf wertvolle technische Beiträge zu den Arbeitsgruppen und den allgemeinen AVCC-Aktivitäten."
Über AVCC
Das Autonomous Vehicle Computing Consortium, Inc.™ (AVCC) ist eine globale gemeinnützige Organisation von führenden Unternehmen der Automobil- und Technologiebranche, die sich zusammengeschlossen haben, um die Massenproduktion von sicheren und erschwinglichen Fahrzeugen mit assistiertem Fahren und autonomer Technologie (Level 1-5) zu beschleunigen. AVCC definiert eine skalierbare Referenzarchitektur und – plattform, die es ermöglicht, die Ziele des assistierten und autonomen Fahrens innerhalb der Leistungs-, Wärme- und Größenbeschränkungen eines Fahrzeugs zu realisieren. Diese Computing-Plattform wird speziell entwickelt, um die heutigen AV-Prototypsysteme im großen Maßstab zum Einsatz zu bringen. Das Konsortium arbeitet auch an der Entwicklung von Standards für die Architektur der Compute-Plattform unter Berücksichtigung der Hardware-Anforderungen und Software-APIs für die Bausteine in autonomen Fahrzeugsystemen. www.avcconsortium.org
KPIT ist ein führender unabhängiger Softwareentwicklungs- und Integrationspartner, der dazu beitragen möchte, die Mobilität in eine saubere, intelligente und sichere Zukunft zu führen. Mit 7000 "Automobelievers" auf der ganzen Welt, die sich auf eingebettete Software, KI und digitale Lösungen spezialisiert haben, beschleunigt KPIT die Implementierung von Technologien der nächsten Generation für die zukünftige Mobilitäts-Roadmap bei seinen Kunden. Mit Entwicklungszentren in Europa, den USA, Japan, China, Thailand und Indien arbeitet KPIT mit führenden Unternehmen der Automobil- und Mobilitätsbranche zusammen und ist dort präsent, wo sich das Ökosystem verändert. Für weitere Informationen besuchen Sie [url=http://www.kpit.com]www.kpit.com[/url]
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()
Anforderungen für erfolgreiche Projekte
Warum ist die Software-Industrialisierung die zentrale Herausforderung für AD-Produktionsprogramme der Stufen 2 und 4, und wie lässt sie sich umsetzen?
In den letzten Jahren gab es großes Interesse für autonomes Fahren (AD) in der Nutzfahrzeugbranche. ADAS und autonome Fahrtechnologien (AD) von Nutzfahrzeugen (CVs) haben das Potential, die Kosten zu verbessern und die Sicherheit zu erhöhen. Diese Business Cases für autonome Nutzfahrzeuge wurden bereits bewiesen. Die CV-Branche zielt jetzt auf Modelle mit Funktionen wie Hub-to-Hub-Fahren, Highway Pilot mit Level-2- und späteren Level 4-Funktionen für Produktionsprogramme ab. Um die Markteinführung autonomer Nutzfahrzeuge (CV, Commercial Vehicle) zu beschleunigen, arbeiten CV-OEMs mit AD-Plattformanbietern wie Torc Robotics, Tu Simple, Aurora, Gatik und Anderen zusammen. Im Rahmen dieser Zusammenarbeit beziehen die OEMs die Software und in manchen Fällen die Hardwareplattform von dessen Plattformanbietern. Die Kontrolle über die Gesamtsystemintegration sowie die Einhaltung von ISO 26262 und der Homologationsanforderungen müssen jedoch bei den OEMs liegen.
Durch das Fehlen von Erfahrungen mit Nutzfahrzeugherstellern für autonome Software und die mangelnden Erfahrungen mit Plattformanbietern bei der Entwicklung von Produktionssoftware und -hardware für sicherheitskritische Systeme entsteht jedoch eine Lücke.
In einem Financial-Times-Interview im Januar 2021 betonte der damalige CEO von Waymo die Tatsache, dass die Umstellung vom Prototyp auf eine sichere produktionsbereite Plattform Erfahrung in den Bereichen Domain, Sicherheit, Simulation und Integration erfordert. Die Plattformsoftware zur Produktionsreife zu bringen und dabei alle Sicherheits- und Regulierungsanforderungen zu erfüllen, ist ein extrem komplexer Vorgang. Sicherheitskritische ADAS- und AD-Software reif für die Produktion zu machen, erfordert ein fundiertes Fachwissen und Erfahrung.
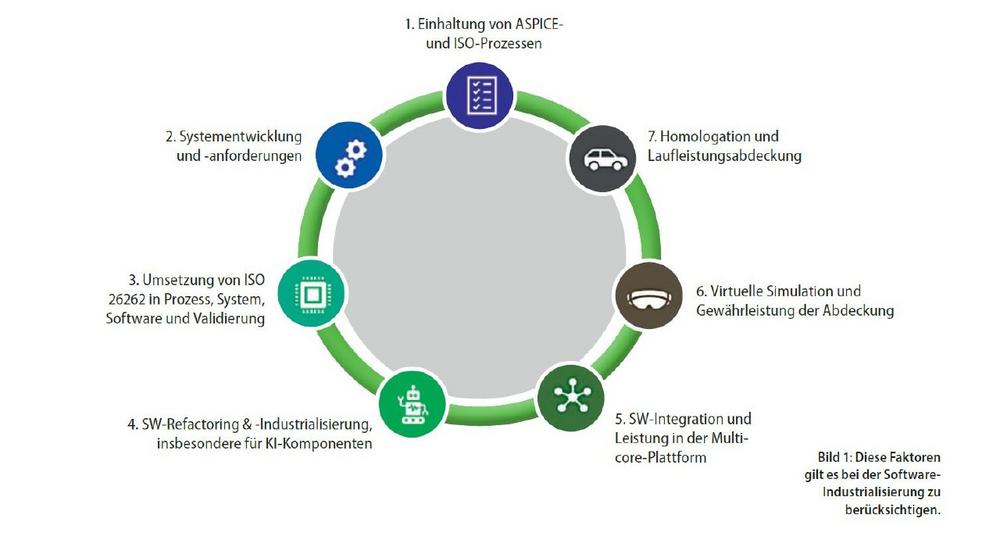
Daher besteht im Nutzfahrzeug-Ökosystem Bedarf für die Zusammenarbeit mit einem "Industrialisierungspartner", der über entsprechende Kompetenz verfügt. Dieser Beitrag stellt Methoden und Best Practices der Software-Industrialisierung für Sicherheitssysteme vor. In ADAS- und AD-Programmen gilt es, die in Bild 1 aufgelisteten Faktoren zu berücksichtigen. Jeder der in Bild 1 erwähnten Punkte umfasst Faktoren, die sich nur aus einem vollständigen Produktionsprogramm heraus verstehen lassen.
Einhaltung von ASPICE- und ISO-Prozessen
Im Allgemeinen konzentrieren sich Plattformanbieter auf die Entwicklung von ADAS- und AD-Funktionen sowie die Erstellung prototypfähiger Lösungen. Diese Lösungen werden dann am Konzeptfahrzeug in kontrollierter Umgebung auf der Straße demonstriert. Bei der Entwicklung dieser Prototypen werden die ASPICE- und ISO-Prozesse nicht befolgt, aber während der Produktionsphase ist es unerlässlich, einen maßgeschneiderten Prozess anzuwenden, alle Dokumentationen einzuhalten und zusätzlich die Entwickler zu schulen, um eine strikte Umsetzung beziehungsweise Einhaltung sicherzustellen.
Ein Software-Industrialisierungspartner übernimmt diese Aufgabe auf dem Weg vom Prototyp zur Produktion, wo er sicherheitskritische Prozesse einführt, die ASPICE als Basisprozess betrachten und alle erforderlichen Prozesse aus ISO 26262, ISO 15288 und anderen Prozessen zusammenführt. Die Implementierung des Prozesses muss dann auch an ein agiles Betriebsmodell angepasst werden. KPIT bietet maßgeschneiderte Prozesse und hat den ISO-Prozess in einer agilen Umgebung bereits umgesetzt.
Die zentrale Bedeutung der Prozessumsetzung liegt nicht in der Prozessdefinition, sondern in der Prozesseinhaltung. Der in Bild 2 erwähnte Prozess wurde unter Berücksichtigung des Selbsterklärungsaspekts und der mit dem Prozess verbundenen Schulung entwickelt. Jeder Entwickler soll dadurch verstehen, was er in der Software tun muss, um den Sicherheitsprozess einzuhalten.
Systementwicklung und -anforderungen
Die Systementwicklung ist ein wichtiger Bestandteil beim Aufbau sicherheitskritischer Systeme. Die Luft- und Raumfahrtindustrie, die ebenfalls sicherheitskritische Systeme für autonomes Fahren erstellt, folgt dem Systementwicklungsprozess bereits in der Konzeptphase mit größter Sorgfalt. Bei der Entwicklung von ADAS und AD ist zu beobachten, dass sich die Entwickler in der Konzeptphase auf die Erprobung des Konzepts in einem Fahrzeug konzentrieren und Systementwicklung, Festlegung von Detailanforderungen sowie Architekturentwicklung für die Folgephasen der Entwicklung vorgesehen sind.
Daher wird es während der Produktionsphase sehr wichtig, die Systemarchitektur sowie die logische und die physische Softwarearchitektur zusammen mit den System-, Software- und Hardwareanforderungen zu erfassen. Zu beachten ist auch, dass die Anzahl der Anforderungen in die Zehntausende geht und sehr große Aufwendungen in Kombination mit umfangreichen Fachkenntnissen erfordert.
KPIT folgt einer Drei-Ansichten-System-Engineering-Methodik, die Skalenexpertise zur Entwicklung von Architektur und Anforderungen mit einer umfangreichen Bibliothek von Artefakten bietet, die Zeit- und Kosteneinsparungen im Programm erzielen.
Umsetzung von ISO 26262 in Prozess, System, Software und Validierung
Die Implementierung der funktionalen Sicherheit gemäß ISO 26262 ist ein Schlüsselfaktor. Beginnend mit dem Sicherheitsprozess sind eine Reihe von Sicherheitsanalysen auf System-, Software- und Hardwareebene durchzuführen.
– Funktionssicherheitskonzept (FSC)
– Gefahren- und Risikoanalyse (HARA)
– Technisches Sicherheitskonzept (FSC)
– Fehlermöglichkeits- und Einflussanalyse (FMEA)
– Fehlerbaumanalyse (FTA)
Neben diesen Aktivitäten sind auch detaillierte Sicherheitsanforderungen Teil der Produktionsphase.
– Anforderungen an die funktionale Sicherheit (FSR)
– Technische Sicherheitsanforderungen (TSR)
– Software-Sicherheitsanforderungen (SSR)
– Hardware-Sicherheitsanforderungen (SSR)
Neben den oben genannten Sicherheitsaktivitäten ist auch die Sicherheitsvalidierung von entscheidender Bedeutung. Es erfordert umfassende Domänenerfahrung und spezielles Fachwissen zum Ableiten von Testfällen anhand von Sicherheitsanforderungen und zum Durchführen von Fehlerinjektionstests sowohl für die Anwendungs- als auch für die Middleware-Software. Die Sicherheit der vorgesehenen Funktion (SOTIF) ist ein weiterer wichtiger Bereich, der in der Produktionsphase zu berücksichtigen ist. KPIT stellt fertig entwickelte Testfallbibliotheken und SOTIF-Szenarien bereit, mit denen sich bei der Produktion Zeit einsparen lässt. Das Unternehmen hat umfassende Engineering- Services für die Umsetzung von ISO 26262 sowie eine Reihe von Beschleunigern anzubieten, mit denen sich Zeit und Kosten optimieren lassen.
Software-Refactoring und -Industrialisierung, insbesondere für Komponenten der KI
Die zentralen Herausforderungen bei ADAS- und AD-Programmen der Stufe 3+ sind der Reifegrad sowie die Qualität der Funktionen und der Algorithmen. In der Prototypenphase findet die Feature-Validierung in einer kontrollierten Umgebung statt.
Daher ist es von entscheidender Bedeutung, die Funktionsreife der Software während der Produktion zu erreichen.
Reifegrad und Qualität werden durch Refactoring und Optimierung des Codes erzielt. Der Code muss MISRA, Standards für funktionale Sicherheit und anderen Richtlinien entsprechen und auch die Grundlagen einer Embedded Umgebung befolgen.
Da die meisten der Algorithmen und Funktionen Modelle künstlicher Intelligenz (KI) enthalten, wird das Refactoring des Codes zu einer Herausforderung. Die Schwierigkeit liegt dabei eher in der Neuartigkeit, weil dies eine der ersten Anwendungen ist, bei denen künstliche Intelligenz für sicherheitskritische Anwendungen zum Einsatz kommt und es keine bewährten Methoden gibt, diese einsatzbereit für die Produktion zu machen. KPIT hat eine robuste und praxisbewährte KI-Industrialisierungsmethodik entwickelt.
Softwareintegration und -leistung in der Multicore-Plattform
Nach dem Software-Refactoring ist der nächste wichtige Schritt die Optimierung des Codes, damit er erstens auf der gewünschten eingebetteten Plattform und zweitens mit der gewünschten Geschwindigkeit ausgeführt wird. Dabei bestimmt die Reaktionszeit von der Erfassung bis zur Betätigung die Leistung des gesamten ADAS- und AD-Systems; diese Reaktionszeit hängt von der Qualität, dem Reifegrad und der eingebetteten Implementierung des Codes ab. Während der Implementierung des Prototyps erfolgen Tests von Funktionen oder Algorithmen nur als einzelne Komponenten, so dass die Reaktionszeit in diesem Fall nicht sonderlich kritisch ist.
In der Produktionsphase jedoch kommen Middleware-Komponenten wie Autosar, Adaptive Autosar und Sicherheitskomponenten hinzu, um den Stack zu komplettieren.
Das Erreichen der gewünschten Mikrosekunden- Anforderungen in Bezug auf die Antwortzeit hängt zum einen davon ab, wie der Code beim Refactoring optimiert wird, zum anderen von den Architekturentscheidungen zur Partitionierung. Daher kommt der Softwarearchitektur, welche die Partitionierung von Software bezüglich der Ausführung auf verschiedenen Grundlagen in Betracht zieht, eine sehr hohe Bedeutung zu. KPIT bringt Erfahrung mit fast allen SoCs (System On Chip) mit, die im ADAS- und AD-Bereich implementiert sind, sowie Best Practices und Methoden für die Partitionierung und Optimierung.
Virtuelle Simulation und Gewährleistung der Abdeckung
Die Validierung autonomer Software durch Simulation ist heutzutage eine unverzichtbare Praxis. Auch die Validierung durch Simulation wird immer ausgereifter. Allerdings ist die Frage, wie die Abdeckung in der Simulation sichergestellt werden kann, in Produktionsprogrammen noch immer ein ungelöstes Problem.
KPIT hat eine Validierungsstrategie entwickelt, um die Abdeckung von kritischen Grenzund SOTIF-Fällen sicherzustellen. Die zur Sicherstellung der Abdeckung berücksichtigten Eingaben umfassen Domänenerfahrung, Analyse von Unfalldaten von über 20 Jahren, Sicherheitsanalysen sowie von NHTSA und ISO empfohlene ODDs (Operat ion Design Domains, Betriebsdesign-Domänen). Bild 3 zeigt die von KPIT entwickelten Bibliothek von Grenz- und SOTIF-Fällen, mit der sich im großen Umfang Zeit und Kosten einsparen lassen.
Homologation und Laufleistungsabdeckung
Die letzten, aber alles andere als unwichtigen Aktivitäten sind die Laufleistungsabdeckung und die Homologation. Dazu gehört nicht nur die SIL/HIL-Methodik sondern auch die Integration von Datenerhebung, Datenaufnahme, Datenmanagement, Analyse und Cloud-Implementierungen. Zusammen mit führenden Industriepartnern hat KPIT eine End-to-End- Methodik entwickelt, um die Prüfstands- und Testmethoden zur Gewährleistung der Homologation umzusetzen.
Schließung der Lücke mit Software-Industrialisierung
Der nächste Schritt besteht darin, Prototypen oder Technologie-Demonstrationen für das autonome Fahren in die Produktion zu bringen, die von Nutzfahrzeug-OEMs und ihren Plattformpartnern entwickelt wurden. Die wichtigsten Anforderungen für diesen Schritt sind das Know-how in puncto ADAS/ADSoftware, die Erfahrung mit Produktionsprogrammen und die Skalierung zur Optimierung von Zeit und Kosten. Mit einem adäquaten Partner lassen sich Einsparungen von bis zu 35 Prozent durch fertige Komponenten und Automatisierungstools und -frameworks erzielen.
Autorin
Dr. Manaswini Rath
Vice President & Global Head of Autonomous Driving,
KPIT Technologies
KPIT Technologies GmbH
Frankfurter Ring 105b
80807 München
Telefon: +49 (89) 3229966-0
Telefax: +49 (89) 3229966-99
http://www.kpit.com
Head of Marketing Germany
Telefon: +49 (89) 3229966-140
Fax: +49 (89) 3229966-999
E-Mail: stefanie.koehler@kpit.com
![]()