
Arnold NextG Blogspot: Drive-by-Wire Decoded – Fahrzeugkontrolle für autonome Systeme
In klassischen Fahrzeugarchitekturen war Sicherheit eng mit dem Konzept des Stillstands verknüpft. Systeme wurden so ausgelegt, dass sie im Fehlerfall abschalten oder in einen passiven Zustand übergehen. Der Fahrer fungierte dabei als übergeordnete Instanz, die eingreifen konnte. Mit zunehmender Automatisierung entfällt diese Rückfallebene.
Ein autonomes Fahrzeug operiert eigenständig, häufig in dynamischen Umgebungen und unter realen Einsatzbedingungen. In diesem Kontext kann Stillstand neue Risiken erzeugen – etwa im fließenden Verkehr, in logistischen Prozessen oder bei sicherheitskritischen Anwendungen. Damit verschiebt sich die zentrale Fragestellung: Nicht mehr, wie ein System sicher abschaltet – sondern wie es unter Einschränkungen kontrollierbar bleibt.
Fail-operational als betriebliche Anforderung
Fail-operational ist kein technisches Zusatzfeature, sondern eine betriebliche Voraussetzung für autonome Systeme. Ein Fahrzeug, das im Fehlerfall stehen bleibt, erfüllt zwar klassische Sicherheitslogiken, ist jedoch im autonomen Betrieb nicht wirtschaftlich nutzbar. Autonome Systeme müssen in der Lage sein, Aufgaben kontrolliert zu Ende zu führen, definierte Zustände zu erreichen oder sich aus komplexen Situationen sicher herauszubewegen. Das bedeutet: Das System muss Fehler nicht nur erkennen, sondern aktiv mit ihnen umgehen.
Es muss bewerten können,
- welche Funktionen noch verfügbar sind
- in welcher Qualität sie arbeiten
- welche Prioritäten gelten
- welche Handlungsoptionen bestehen
Solche Entscheidungen sind Teil der Systemarchitektur – nicht der Laufzeitlogik allein. Fail-operationales Verhalten ist damit kein Ausnahmezustand, sondern ein vorgesehener Betriebsmodus.
Warum fail-operational nicht nachrüstbar ist
Ein häufiges Missverständnis besteht darin, fail-operational als Erweiterung bestehender Sicherheitskonzepte zu betrachten. In der Praxis ist das nicht möglich.
Fail-operational erfordert eine Architektur, in der Redundanz, Überwachung, Entscheidungslogik und Aktorik von Beginn an aufeinander abgestimmt sind. Es geht nicht nur darum, mehrere Komponenten vorzuhalten, sondern darum, wie das System mit degradierten Zuständen umgeht. Ein System, das lediglich erkennt, dass eine Funktion ausgefallen ist, ist nicht fail-operational. Erst wenn es unter diesen Bedingungen gezielt weiterarbeiten kann, erfüllt es diese Anforderung.
Normative Grundlagen wie ISO 26262 zur funktionalen Sicherheit adressieren Sicherheitsanforderungen auf Systemebene, definieren jedoch nicht automatisch fail-operationales Verhalten im Betrieb.
Der Unterschied zeigt sich im Betrieb
In frühen Entwicklungsphasen lassen sich fail-safe und fail-operational oft nur schwer unterscheiden. Beide Ansätze können plausibel spezifiziert und normgerecht dokumentiert werden.
Der Unterschied zeigt sich erst im realen Betrieb. Dann wird sichtbar,
- ob Systeme Übergänge zwischen Zuständen stabil beherrschen
- ob degradierte Betriebsmodi kontrolliert gehalten werden können
- ob das Fahrzeug auch unter eingeschränkten Bedingungen vorhersehbar reagiert
Gerade in autonomen Anwendungen ist diese Fähigkeit entscheidend. Unkontrollierte Zustandswechsel oder abrupte Abschaltungen können selbst zu Sicherheitsrisiken werden. Fail-operational ist damit weniger eine Frage der Zertifizierung als eine Frage der Systemreife.
Warum fail-operational oft unterschätzt wird
In vielen Autonomieprogrammen liegt der Fokus auf Wahrnehmungssystemen und Entscheidungsalgorithmen. Fahrzeugkontrolle wird häufig als infrastrukturelle Voraussetzung betrachtet, nicht als limitierender Faktor. Erst im Übergang vom Testbetrieb in reale Anwendungen wird deutlich, dass ohne fail-operationale Steuerung viele Funktionen zwar theoretisch möglich sind, praktisch jedoch nicht betrieben werden können.
Fail-operationales Design entscheidet darüber, ob ein System lediglich funktioniert – oder tatsächlich betrieben werden kann. Zu diesem Zeitpunkt lassen sich grundlegende Architekturentscheidungen nicht mehr korrigieren.
Fahrzeugkontrolle als Voraussetzung für Autonomie
Für autonome Fahrzeugarchitekturen bedeutet dies einen grundlegenden Perspektivwechsel. Sicherheit entsteht nicht mehr durch Abschaltung, sondern durch kontrollierte Fortsetzung von Bewegung. Die Fähigkeit, auch unter eingeschränkten Bedingungen handlungsfähig zu bleiben, wird zur Voraussetzung für Betrieb, Skalierung und Akzeptanz.
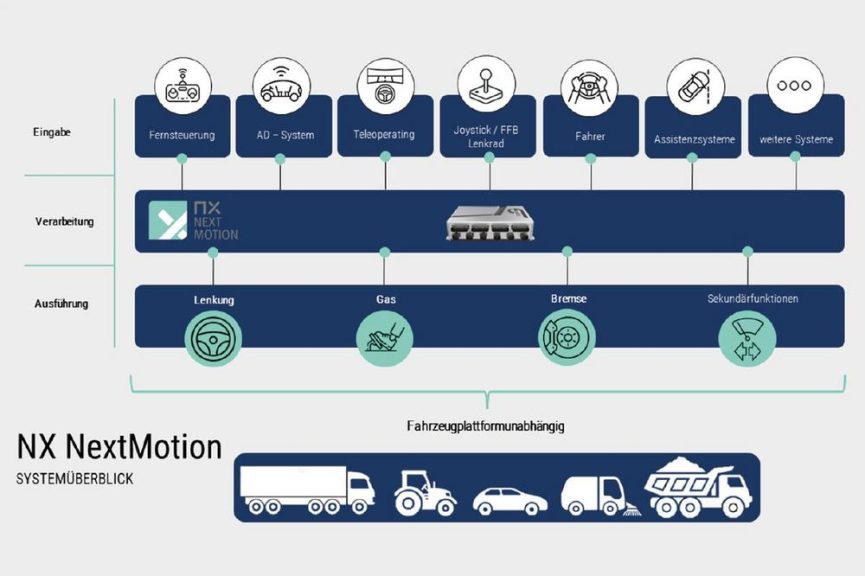
Plattformansätze wie NX NextMotion von Arnold NextG adressieren genau diese Anforderung, indem sie Lenkung, Bremse und Antrieb in einer gemeinsamen, multi-redundanten und fail-operationalen Drive-by-Wire-Architektur zusammenführen. Damit wird Fahrzeugkontrolle nicht als Reaktion auf Fehler verstanden, sondern als kontinuierlich abgesicherte Systemfunktion.
Ein neuer Maßstab für Fahrzeugkontrolle
Für Entwickler, Integratoren und Betreiber autonomer Systeme verschiebt sich damit die zentrale Bewertungsgröße. Nicht mehr: Ist ein System im Fehlerfall sicher? Sondern: Kann es im Fehlerfall weiterhin sicher handeln? Diese Fähigkeit definiert den Übergang von assistierten zu autonomen Systemen – und stellt neue Anforderungen an die zugrunde liegende Fahrzeugarchitektur.
Ausblick
Im nächsten Beitrag dieser Serie betrachten wir, warum Plattformunabhängigkeit und Nachrüstbarkeit keine Randthemen sind, sondern zentrale Voraussetzungen für die reale Einführung autonomer Systeme.
WE CONTROL WHAT MOVES
weiterführende Informationen unter: www.arnoldnextg.de/blog
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()
Arnold NextG Blogspot: Drive-by-Wire Decoded – Fahrzeugkontrolle für autonome Systeme
In der Diskussion um elektronische Fahrzeugsteuerung wird häufig implizit angenommen, dass sich ein funktionierendes Gesamtsystem aus hochwertigen Einzelkomponenten zusammensetzen lässt. Steer-by-Wire-Lenkung, Brake-by-Wire-Bremsen, redundante Steuergeräte – all diese Technologien existieren und sind in vielen Fällen bereits sicherheitszertifiziert.
Die Schlussfolgerung scheint naheliegend: Wenn jede einzelne Komponente für sich sicher ist, muss das Gesamtsystem ebenfalls sicher sein. Technisch betrachtet greift diese Annahme jedoch zu kurz. Denn Sicherheit, Verfügbarkeit und Kontrollierbarkeit autonomer Fahrzeuge entstehen nicht durch die Addition einzelner Funktionen – sondern durch das Verhalten des Gesamtsystems.
Warum Safety nicht additiv ist
In klassischen Fahrzeugarchitekturen war es lange zulässig, Sicherheit primär auf Komponentenebene zu betrachten. Der Fahrer fungierte als übergeordnete Instanz, die im Zweifel eingreifen konnte. Systeme wurden daher häufig so ausgelegt, dass sie im Fehlerfall in einen sicheren Zustand übergehen – beispielsweise durch Abschaltung oder durch Rückfall auf mechanische Funktionen. Autonome Fahrzeuge verändern diese Logik grundlegend.
Wenn kein Fahrer mehr vorhanden ist, wird das System selbst zum letzten Entscheidungsträger. Sicherheit entsteht dann nicht mehr durch isolierte Funktionen, sondern durch das koordinierte Zusammenspiel aller Subsysteme – einschließlich ihrer Übergänge, Abhängigkeiten und Fehlermodi. Ein Brake-by-Wire-Modul kann beispielsweise ASIL-D-konform sein, ebenso ein Steer-by-Wire-System gemäß den Anforderungen der funktionalen Sicherheit nach ISO 26262.
Doch entscheidend ist, wie sich beide Systeme im Zusammenspiel verhalten:
Was passiert, wenn mehrere Funktionen gleichzeitig degradiert arbeiten?
Wie reagieren Systeme bei eingeschränkten Kommunikationspfaden?
Welche Prioritäten gelten im Grenzfall? Solche Fragen lassen sich nicht auf Komponentenebene beantworten. Sie müssen auf Systemebene entschieden werden.
Die Integrationslücke in der Praxis
Genau hier zeigt sich eine strukturelle Herausforderung im Markt. Viele OEMs, Systemintegratoren oder Betreiber autonomer Flotten erhalten von Zulieferern hochentwickelte Drive-by-Wire-Bausteine. Diese Komponenten sind leistungsfähig, zertifiziert und technisch ausgereift. Was sie jedoch häufig nicht liefern, ist eine verbindliche Aussage über das Verhalten des Gesamtsystems.
Die Konsequenz: Die Verantwortung für Integration, Safety-Argumentation und fail-operationale Betriebsstrategien verschiebt sich zum Fahrzeughersteller oder Integrator. Dieser muss entscheiden, wie Komponenten kombiniert werden, wie Redundanzen zusammenspielen und wie das Fahrzeug im Fehlerfall weiterhin kontrollierbar bleibt. Damit wird Integration selbst zu einer sicherheitskritischen Systemaufgabe.
Drive-by-Wire als Architekturfrage
Ein echtes Drive-by-Wire-System beginnt daher nicht bei der Auswahl einzelner Komponenten, sondern bei der Architektur. Zu den zentralen Elementen gehören unter anderem:
- klare Trennung und Redundanz sicherheitskritischer Funktionen
- deterministische Kommunikationspfade im Fahrzeugnetzwerk
- abgestimmte Regelungs- und Überwachungsmechanismen
- konsistentes Energiemanagement
- ein systemweites Safety-Konzept
Entscheidend ist dabei nicht nur, dass Redundanz vorhanden ist, sondern wie sie genutzt wird. Redundanz ohne systemische Logik führt im besten Fall zu Stillstand – im ungünstigsten Fall zu unvorhersehbarem Verhalten. Systemdenken bedeutet daher, diese Aspekte von Beginn an zusammenzuführen und nicht erst während der Integration.
Plattformunabhängigkeit als Systemkriterium
Ein weiteres Merkmal systemischer Reife ist Plattformunabhängigkeit. Viele Drive-by-Wire-Lösungen sind eng an spezifische Fahrzeugplattformen gebunden. Das erleichtert Serienintegration, erschwert jedoch die Übertragbarkeit auf andere Fahrzeugtypen oder bestehende Flotten. Autonome Anwendungen entstehen jedoch selten ausschließlich auf neuen Plattformen. Häufig werden bestehende Fahrzeuge automatisiert oder teleoperiert.
Für solche Szenarien sind Drive-by-Wire-Architekturen erforderlich, die sich an unterschiedliche Fahrzeugplattformen anpassen lassen, ohne ihre Sicherheitslogik neu zu definieren. Auch diese Fähigkeit ist keine Eigenschaft einzelner Komponenten, sondern das Ergebnis einer systemischen Architekturentscheidung.
Wenn Fahrzeugkontrolle zur Systemverantwortung wird
Systemverantwortung bedeutet mehr als die Lieferung einzelner Bauteile. Sie umfasst auch die Fähigkeit, Aussagen über das Gesamtverhalten eines Fahrzeugs zu treffen – technisch, regulatorisch und betrieblich.
Plattformansätze wie NX NextMotion von Arnold NextG verfolgen genau diesen systemischen Ansatz. Die Drive-by-Wire-Steuerungsplattform integriert Lenkung, Bremse, Antrieb und weitere Fahrzeugfunktionen in einer gemeinsamen, multi-redundanten und fail-operationalen Architektur. Ziel solcher Architekturen ist es, Fahrzeugkontrolle nicht als Sammlung einzelner Funktionen zu betrachten, sondern als kohärentes Gesamtsystem.
Ein notwendiger Perspektivwechsel
Für Entwickler, Integratoren und Betreiber autonomer Systeme ergibt sich daraus eine zentrale Frage. Nicht mehr: Welche Komponenten stehen zur Verfügung? Sondern:
Wer übernimmt Verantwortung für das System? Solange Drive-by-Wire primär als Baukasten verstanden wird, bleibt autonomes Fahren ein Integrationsprojekt. Erst wenn Fahrzeugkontrolle als integriertes Gesamtsystem gedacht wird, entsteht die Grundlage für skalierbaren und sicheren Betrieb autonomer Fahrzeuge.
Ausblick
Im nächsten Beitrag dieser Serie betrachten wir einen oft missverstandenen Kernbegriff moderner Fahrzeugarchitekturen: den Unterschied zwischen fail-safe und fail-operational – und warum diese Unterscheidung für autonome Systeme nicht theoretisch, sondern praktisch entscheidend ist.
WE CONTROL WHAT MOVES
weiterführende Informationen unter www.arnoldnextg.de/Blog
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. [url=http://www.arnoldnextg.de]www.arnoldnextg.de[/url]
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()
Arnold NextG Blogspot: Drive-by-Wire Decoded – Fahrzeugkontrolle für autonome Systeme
Autonomes Fahren wird meist über Sensorik, KI und Rechenleistung diskutiert. Eine zentrale Voraussetzung bleibt dabei oft im Hintergrund: die sichere Kontrolle von Fahrzeugbewegung. Elektronische Lenkung, Bremsen und Antriebssysteme sind seit Jahren Bestandteil moderner Fahrzeugarchitekturen. Entsprechend gilt X-by-Wire vielen als ausgereifte Technologie. Etablierte Lieferketten, bekannte Industrieakteure und zahlreiche Serienanwendungen vermitteln den Eindruck eines weitgehend entschiedenen Marktes.
Bei genauerer Betrachtung zeigt sich jedoch ein anderes Bild – insbesondere dort, wo Drive-by-Wire nicht als Komfort- oder Assistenzfunktion verstanden wird, sondern als Grundlage für autonomes Fahren oder Teleoperation. Denn was heute häufig als Drive-by-Wire bezeichnet wird, sind in der Praxis meist Einzellösungen oder Teilsysteme. Eine vollständig integrierte, fail-operationale Fahrzeugsteuerung auf Systemebene ist weiterhin die Ausnahme.
Komponenten sind nicht gleich Systeme
Technisch betrachtet ist Drive-by-Wire kein einzelnes Produkt, sondern eine Architekturfrage. Ein echtes Drive-by-Wire-System ersetzt nicht nur mechanische Verbindungen durch elektrische Signale. Es muss sicherstellen, dass ein Fahrzeug unter allen Betriebsbedingungen steuerungsfähig bleibt – auch dann, wenn einzelne Komponenten ausfallen.
Dazu gehören unter anderem:
- eine integrierte Kombination aus Aktorik, Sensorik und Steuergeräten
- redundante Kommunikations- und Energieversorgung
- eine konsistente Software- und Regelungsarchitektur
- ein systemweites Safety-Konzept
- eine klare Verantwortung für das Gesamtverhalten des Fahrzeugs
Sicherheitsanforderungen solcher Systeme orientieren sich unter anderem an Normen wie ISO 26262 zur funktionalen Sicherheit. In der Praxis erhalten OEMs oder Systemintegratoren jedoch häufig keine vollständigen Systeme, sondern einzelne Komponenten – etwa Steer-by-Wire- oder Brake-by-Wire-Module mit jeweils eigener Zertifizierung.
Die Integration zum Gesamtsystem, die Definition des fail-operationalen Verhaltens und die sicherheitstechnische Gesamtargumentation verbleiben damit häufig beim Fahrzeughersteller. Das ist kein Qualitätsmangel einzelner Komponenten, sondern die Folge eines Marktes, der historisch entlang von Produktlinien und nicht entlang von Systemverantwortung gewachsen ist.
Warum große Anbieter selten komplette Systeme liefern
Rückblickend ist diese Situation nachvollziehbar. Viele Drive-by-Wire-Lösungen sind aus bestehenden mechanischen Fahrzeugarchitekturen heraus entstanden. Sie wurden für Fahrzeuge entwickelt, in denen ein Mensch als letzte Rückfallebene verfügbar ist. Entsprechend dominieren fail-safe-Konzepte, bei denen ein System im Fehlerfall in einen sicheren Zustand übergeht – etwa durch Abschaltung oder Übergabe an den Fahrer.
Autonome Fahrzeuge stellen jedoch andere Anforderungen. Wenn kein Fahrer vorhanden ist, darf das System nicht einfach abschalten. Es muss kontrolliert weiterarbeiten können. Das erfordert fail-operationale Systemarchitekturen, bei denen Redundanz, Fehlererkennung und Weiterbetrieb von Beginn an systemisch gedacht sind.
Auch regulatorisch gewinnt dieses Thema zunehmend an Bedeutung. Internationale Regelwerke wie die UNECE-Regulierung R79 für elektronische Lenksysteme definieren Anforderungen an sicherheitskritische Fahrzeugsteuerung.
Ein Markt auf Systemebene – und genau deshalb offen
Auf Komponentenebene ist der Drive-by-Wire-Markt weit entwickelt. Auf Systemebene hingegen nicht. Weltweit gibt es nur eine begrenzte Anzahl von Unternehmen, die tatsächlich ein vollständiges Drive-by-Wire-System liefern können – inklusive Hardware, Software, Redundanzkonzept und systemweiter Safety-Argumentation aus einer Hand.
Noch seltener sind Lösungen, die plattformunabhängig funktionieren und sowohl für neue Fahrzeugplattformen als auch für die Nachrüstung bestehender Flotten geeignet sind. Gerade in Bereichen wie Logistik, Landwirtschaft, Bergbau, Bauwesen, Verteidigung oder öffentlichem Verkehr beginnt Autonomie selten auf einer komplett neuen Plattform. Häufig werden bestehende Fahrzeuge automatisiert oder teleoperiert. Damit rückt die Nachrüstfähigkeit von Drive-by-Wire-Systemen stärker in den Mittelpunkt architektonischer Entscheidungen.
Plattformansätze wie die Drive-by-Wire-Steuerungsplattform NX NextMotion von Arnold NextG zielen genau auf diese Systemebene ab: Sie integrieren Lenkung, Bremse, Antrieb und weitere Fahrzeugfunktionen in einer gemeinsamen, multi-redundanten und fail-operationalen Steuerungsarchitektur – unabhängig von der jeweiligen Fahrzeugplattform.
Fahrzeugkontrolle als Fundament autonomer Systeme
Die Diskussion über autonome Mobilität wird häufig von Wahrnehmungssystemen und künstlicher Intelligenz geprägt. Doch selbst die leistungsfähigste KI kann ein Fahrzeug nur so sicher bewegen, wie es die zugrunde liegende Steuerungsarchitektur erlaubt. Erst wenn Fahrzeugkontrolle als integriertes System verstanden wird – und nicht als Sammlung einzelner Komponenten – lässt sich Autonomie zuverlässig in reale Anwendungen überführen.
Vor diesem Hintergrund entstehen neue Plattformansätze für vollständig elektronische Fahrzeugsteuerung. Plattformen wie NX NextMotion verfolgen beispielsweise das Ziel, Lenkung, Bremse, Antrieb und weitere Fahrzeugfunktionen in einer gemeinsamen, multi-redundanten Drive-by-Wire-Architektur zusammenzuführen. Der Markt für echtes Drive-by-Wire ist deshalb noch lange nicht entschieden. Nicht weil es an Technologie fehlt – sondern weil Systemdenken, Architekturverantwortung und Betriebserfahrung selten zusammenkommen.
Ausblick
Im nächsten Beitrag dieser Serie betrachten wir eine zentrale Architekturentscheidung moderner Fahrzeugsteuerung: den Unterschied zwischen fail-safe und fail-operational – und warum diese Unterscheidung für autonome Systeme praktisch entscheidend ist.
WE CONTROL WHAT MOVES!
Weiterführende informationen unter: www.arnoldnextg/Blog
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()
Arnold NextG Blogspot: Branchen im Fokus – Wie Autonomie branchenspezifische Mobilität neu definiert
Während die technologischen Grundpfeiler – Wahrnehmung, Planung, Konnektivität und Drive-by-Wire – übergreifend ähnlich sind, entscheidet die domänenspezifische Ausgestaltung über Wirtschaftlichkeit und Zulassungsfähigkeit. Autonomie muss sich der Branche anpassen, nicht umgekehrt.
Öffentlicher Verkehr: Effizienz und Inklusion im geofenceten Betrieb
Im öffentlichen Verkehr werden autonome Systeme überwiegend als Level-4-Shuttles in klar definierten Betriebsgebieten eingesetzt. Ziel ist es, Regionen mit geringer Nachfrage wirtschaftlich zu erschließen, Betriebskosten zu senken und barrierefreie Mobilität zu ermöglichen.
Pilotprojekte in Kelheim, Monheim und Augsburg zeigen, dass autonome Shuttle-Lösungen bereits unter realen Bedingungen betrieben werden – mit Remote-Leitzentralen, V2X-Kommunikation und Integration in bestehende ÖPNV-Systeme. Das vom BMDV begleitete Handbuch „Autonomes Fahren im öffentlichen Verkehr“ (2024) unterstreicht dabei die Bedeutung klar definierter Betriebsräume, strukturierter Sicherheitskonzepte und durchgängiger Systemintegration. Gerade das Augsburger Modellprojekt verdeutlicht, dass Autonomie im ÖPNV nicht isoliert funktioniert, sondern als Teil eines digitalen Verkehrssystems gedacht werden muss – inklusive Leitstandsanbindung, Betriebsüberwachung und klar definierten Degradationsstrategien im Störfall.
Technisch stehen sichere Fahrgastinteraktion, vorhersehbare Fallback-Strategien und eine zertifizierte Steuerarchitektur im Fokus. NX NextMotion von Arnold NextG fungiert in solchen Szenarien als fehlertolerante Ausführungsebene zwischen Entscheidungssoftware und Fahrzeugbewegung – entscheidend für fahrerlose Betriebsmodelle, in denen die sichere Umsetzung von Lenk-, Brems- und Antriebskommandos regulatorisch nachweisbar sein muss.
Logistik & Letzte Meile: Dauerbetrieb in strukturierten Umgebungen
In Logistikzentren, auf Betriebshöfen oder in der letzten Meile dominiert ein anderes Anforderungsprofil. Die Umgebungen sind häufig strukturiert, die Geschwindigkeiten moderat, die Wiederholraten hoch. Ziel ist die Automatisierung repetitiver Prozesse im 24/7-Betrieb. Autonome Hoftrucks, Lieferroboter und Lagerfahrzeuge benötigen hochpräzise Lenk- und Bremssteuerung, robuste Pfadplanung für enge Manöver und Teleoperation als Fallback-Ebene. Gerade in flottenbasierten Anwendungen ist eine redundante Drive-by-Wire-Architektur essenziell, um Ausfallzeiten zu minimieren.
Hier kommt die fail-operational Architektur von NX NextMotion zum Tragen: physikalisch und logisch getrennte Steuerpfade ermöglichen kontrollierten Weiterbetrieb selbst bei Teilausfällen – ein entscheidender Faktor für wirtschaftliche Skalierung.
Häfen & Hofautomatisierung: Kontrollierte Komplexität
Hafenanlagen und Containerterminals kombinieren strukturierte Betriebsflächen mit komplexen Prozessketten. Selbstfahrende Terminal-Traktoren bewegen Container zwischen Kai, Lager und Krananlagen – häufig im Mischbetrieb mit Personal. Branchenberichte, wie der Volvo Autonomous Trucks Report (2025), zeigen, dass hybride Systeme aus Autonomie und Fernsteuerung zunehmend erprobt werden. Zentimetergenaue Lokalisierung, Echtzeit-Flottenkoordination und definierte Degradationsmodi sind hier zentrale Anforderungen.
Für OEMs bedeutet das: Bewegungssysteme müssen deterministisch, fernsteuerbar und zertifizierbar sein. NX NextMotion ist auf diese Anforderungen ausgelegt – mit vollständiger Integration in Leitstände und Flottenmanagementsysteme.
Bergbau & Bauwesen: Autonomie unter Extrembedingungen
In Minen und auf Großbaustellen herrschen Bedingungen, die klassische Straßenfahrzeugarchitekturen schnell überfordern. Staub, Vibration, Erschütterung und häufige GNSS-Einschränkungen verlangen robuste, redundant ausgelegte Systeme. Autonome Muldenkipper, Planierraupen oder Bagger werden eingesetzt, um Personal aus Gefahrenzonen zu entfernen und Produktivität unter extremen Bedingungen aufrechtzuerhalten. Wahrnehmungssysteme sind häufig LiDAR-dominiert, Teleoperation muss auch bei begrenzter Bandbreite zuverlässig funktionieren.
Für Retrofit-Projekte ist mechanische Lenkung oft ungeeignet. Hier wird Drive-by-Wire zur Schlüsseltechnologie. NX NextMotion ermöglicht die elektronische Steuerung bestehender Plattformen und integriert sicherheitsgerichtete Fallback-Mechanismen in Umgebungen mit hoher mechanischer Belastung.
Verteidigung & taktische Mobilität: Sicherheit unter Bedrohung
Im militärischen Kontext steht der Schutz von Personal im Vordergrund. Teilautonome oder teleoperierte Truppentransporter und Logistikkonvois reduzieren die Gefährdung in Hochrisikozonen. Neben funktionaler Sicherheit sind hier gehärtete Steuerarchitekturen und Cyber-Resilienz entscheidend. Militärische Standards und regulatorische Anforderungen – etwa im Kontext von UNECE R155 oder NATO-nahen Spezifikationen – verlangen verschlüsselte Kommunikationspfade und redundante ECU-Strukturen.
Arnold NextG hat seine Architektur in Abstimmung mit Verteidigungsanforderungen entwickelt. SAFE_CAN, getrennte Sicherheitsdomänen und fail-operational Logik bilden die Grundlage für robuste taktische Anwendungen.
Landwirtschaft: Präzision im Großmaßstab
Autonome Traktoren, Erntemaschinen und Sprüheinheiten operieren in großflächigen, halbstrukturierten Umgebungen. Ziel ist die Reduktion von Saisonarbeitsabhängigkeit, Ressourceneffizienz und präzise Bewirtschaftung. GNSS in Kombination mit RTK-Korrektursignalen ermöglicht zentimetergenaue Spurführung. Gleichzeitig müssen Systeme dezentral entscheidungsfähig bleiben, da dauerhafte Konnektivität nicht garantiert ist. Sicherheitsanforderungen werden unter anderem durch ISO 25119 für Landmaschinen definiert.
NX NextMotion wird in landwirtschaftlichen Pilotprojekten eingesetzt, um autonome Fahrmanöver auf unstrukturiertem Gelände sicher umzusetzen – auch ohne permanente Remote-Überwachung.
Fazit: Branchenspezifische Lösungen auf systemischer Grundlage
Autonomie manifestiert sich in jeder Branche unterschiedlich – in Geschwindigkeit, Regulatorik, Infrastruktur und Risikoprofil. Dennoch basieren alle Anwendungen auf gemeinsamen technologischen Fundamenten: sensorbasierte Wahrnehmung, robuste Entscheidungslogik, zertifizierte Drive-by-Wire-Steuerung und skalierbare Infrastrukturintegration. Für OEMs und Tier-1-Zulieferer bedeutet das: Wettbewerbsvorteile entstehen nicht durch isolierte Komponenten, sondern durch systemische Integrationsfähigkeit.
Arnold NextG positioniert sich mit NX NextMotion als Teil dieser domänenspezifischen Systemarchitekturen – als fehlertolerante, zertifizierbare und teleoperationsfähige Bewegungsschicht für unterschiedlichste Branchen.
We control what moves!
weiterführende Informationen unter: www.arnoldnextg.de
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()

Arnold NextG Blogspot: Infrastruktur, Konnektivität & Teleoperation – Das unsichtbare Rückgrat autonomer Systeme
Internationale Fachgremien wie ASAM betonen in aktuellen Veröffentlichungen, dass sich die „Intelligenz“ automatisierter Systeme zunehmend vom Fahrzeug auf ein verteiltes Gesamtsystem aus Infrastruktur- und Backend-Komponenten verlagert (ASAM Automated Driving Infrastructure Report, 2024). Für OEMs und Systemintegratoren bedeutet das: Autonomie ist eine Systemarchitekturfrage – nicht nur eine Fahrzeugfunktion.
Infrastruktur als operative Voraussetzung
Autonome Fahrzeuge greifen kontinuierlich auf externe Datenquellen zurück. Dazu zählen hochauflösende HD-Karten mit zentimetergenauen Streckendaten, aktuelle Baustelleninformationen oder dynamische Verkehrsbeschilderung. Ergänzt wird dies durch V2X-Kommunikation, über die Fahrzeuge Echtzeitdaten von Ampeln, Kreuzungen oder anderen Verkehrsteilnehmern empfangen.
GNSS-Korrekturdienste erhöhen die Positionsgenauigkeit deutlich, während lokale Edge-Computing-Knoten sicherheitsrelevante Daten vorverarbeiten und damit Latenzen reduzieren. Gerade im urbanen Umfeld oder in industriellen Arealen ist diese verteilte Rechenarchitektur entscheidend für stabile Entscheidungsprozesse.
Das vom Bundesministerium für Digitales und Verkehr veröffentlichte „Handbuch Autonomes Fahren – Öffentlicher Verkehr“ unterstreicht, dass Infrastrukturintegration eine Grundvoraussetzung für den regulären Betrieb autonomer Systeme darstellt (BMDV, 2024).
Für OEMs bedeutet das: Fahrzeugplattformen müssen von Beginn an infrastrukturfähig konzipiert sein. NX NextMotion von Arnold NextG ist daher nicht nur als Drive-by-Wire-System ausgelegt, sondern als integrierbare Bewegungsschicht innerhalb vernetzter Architekturen – mit definierten Schnittstellen für V2X, Remote-Systeme und Edge-Anbindung.
5G, C-V2X und deterministische Latenz
Autonome Systeme stellen höchste Anforderungen an Kommunikationsnetze. Sicherheitsrelevante Daten dürfen nicht verzögert oder prioritätslos übertragen werden. Technologien wie 5G und C-V2X (Cellular Vehicle-to-Everything) adressieren genau diese Anforderungen.
Technische Berichte von 3GPP und der 5G Automotive Association (5GAA) zeigen, dass 5G-Latenzen im einstelligen Millisekundenbereich sowie Network-Slicing-Funktionalitäten für priorisierte Datenströme ermöglichen (3GPP / 5GAA Technical Reports, 2023–2024). Für autonome Systeme ist das entscheidend, wenn Remote-Assistenz oder kooperative Manöver sicher ausgeführt werden sollen.
Für die Bewegungsausführung bedeutet dies, dass Steuerbefehle auch bei externer Einflussnahme deterministisch umgesetzt werden müssen. NX NextMotion ist deshalb auf latenzkritische Kommunikationspfade vorbereitet und ermöglicht die sichere Übergabe von extern generierten Fahrbefehlen – abgesichert durch redundante Steuerpfade und fail-operational Architektur.
Teleoperation als operative Sicherheitsebene
Auch in hochautomatisierten Systemen gibt es Grenzsituationen: unklare Baustellenführung, manuelle Verkehrsregelung oder nicht modellierte Sonderfälle. Hier kommt Teleoperation ins Spiel – nicht als Ersatz für Autonomie, sondern als zusätzliche Sicherheitsebene. Remote Monitoring ermöglicht die Überwachung von Fahrzeugzuständen in Leitstellen. Remote Assistance erlaubt Eingriffe auf Entscheidungslogikebene, während Remote Driving in Ausnahmefällen eine vollständige Fernsteuerung erlaubt.
Damit Teleoperation regulatorisch und technisch tragfähig ist, müssen Lenkung, Bremse und Antrieb vollständig elektronisch und redundant ausgeführt werden. NX NextMotion wurde genau für diese Szenarien entwickelt: Die Plattform erlaubt die sichere Fernsteuerung aller Bewegungsfunktionen und bleibt dabei fail-operational – selbst bei Teilausfällen einzelner Systempfade.
Gerade in autonomen Frachthöfen, militärischen Logistikkonvois oder bei innerstädtischen Shuttle-Systemen wird Teleoperation als Bestandteil des operativen Sicherheitskonzepts implementiert.
Branchenspezifische Infrastrukturmodelle
Infrastruktur ist kein universelles Konstrukt. Unterschiedliche Branchen erfordern unterschiedliche Architekturen. Im öffentlichen Verkehr stehen digitale Haltestellen, Remote-Assistenzzentren und klar definierte Betriebszonen im Fokus. Hafenanlagen arbeiten mit geschlossenen Systemen, exakter Lokalisierung und zentralen Leitständen. Im Bergbau dominieren private LTE- oder 5G-Netze sowie GNSS-unabhängige Navigationslösungen. Verteidigungsanwendungen erfordern verschlüsselte Kommunikationspfade, isolierte Sicherheitsdomänen und Echtzeit-Override-Fähigkeit.
Für OEMs und Tier-1-Zulieferer bedeutet das: Bewegungssysteme müssen flexibel genug sein, um sich in diese unterschiedlichen Infrastrukturen integrieren zu lassen. Arnold NextG adressiert diese Anforderungen, indem NX NextMotion als modulare Motion-Plattform mit offenen Schnittstellen konzipiert ist – einsetzbar in zivilen, industriellen und sicherheitskritischen Umgebungen.
Infrastruktur als Geschäftsmodell
Mit der zunehmenden Reife autonomer Systeme entstehen neue Betriebsmodelle. „Autonomy-as-a-Service“-Ansätze bündeln Fahrzeug, Infrastruktur, Leitstand, Konnektivität und Wartung in einem integrierten Gesamtangebot. Branchenanalysen, etwa von Bitkom (2024), zeigen, dass diese Plattformmodelle insbesondere für Städte, Logistikbetreiber und industrielle Flotten attraktiv sind, da sie Investitionsbarrieren senken und Skalierung ermöglichen.
In solchen Szenarien wird Drive-by-Wire nicht mehr als Einzelkomponente betrachtet, sondern als integraler Bestandteil eines Gesamtökosystems. NX NextMotion fungiert hier als bewegungsnahe Ausführungsschicht innerhalb eines vernetzten Betriebsmodells – kompatibel mit Remote-Systemen, OTA-Update-Strukturen und sicherheitsgerichteter Backend-Integration.
Fazit: Ohne Infrastruktur keine Autonomie
Autonome Fahrzeuge sind nur so leistungsfähig wie das Ökosystem, in dem sie operieren. Konnektivität, Edge-Rechenleistung, Kartenservices und Teleoperationsarchitekturen bilden das unsichtbare Rückgrat moderner Autonomiestrategien. Für OEMs und Tier-1-Entscheider bedeutet das: Skalierbare Autonomie entsteht nicht allein durch Sensorik oder KI, sondern durch die systemische Integration von Infrastruktur, Kommunikation und zertifizierter Bewegungsausführung.
Arnold NextG positioniert NX NextMotion genau an dieser Schnittstelle – als fail-operational Motion-Plattform innerhalb vernetzter, regulatorisch abgesicherter Autonomiesysteme.
We control what moves!
weiterführende Informationen unter: www.arnoldnextg.de/blog
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()

Arnold NextG Blogspot: Sicherheit, Redundanz & Cybersecurity – Wie Vertrauen in autonome Systeme entsteht
Im Zentrum stehen dabei drei eng verzahnte Disziplinen: funktionale Sicherheit, Redundanzarchitekturen und Cybersecurity. Sie definieren, ob autonome Systeme nicht nur technisch möglich, sondern auch regulatorisch genehmigungsfähig und gesellschaftlich akzeptiert sind.
Funktionale Sicherheit: Vorhersehbares Verhalten statt Fehlerfreiheit
Funktionale Sicherheit zielt nicht darauf ab, Fehler vollständig zu vermeiden. Sie stellt sicher, dass Systeme auch im Fehlerfall kontrolliert, nachvollziehbar und risikoarm reagieren. Für autonome Fahrzeuge bilden internationale Normen den verbindlichen Rahmen.
Die ISO 26262 definiert Anforderungen an die funktionale Sicherheit elektrischer und elektronischer Fahrzeugsysteme, während ISO/PAS 21448 (SOTIF) gezielt Szenarien adressiert, in denen Systeme technisch korrekt arbeiten, aber aufgrund externer Einflüsse – etwa Blendung, Nebel oder unvollständige Umfelddaten – dennoch falsche Entscheidungen treffen könnten. Für hoch- und vollautomatisierte Fahrzeuge ergänzt UL 4600 diese Anforderungen um einen systemischen Sicherheitsnachweis ohne menschliche Rückfallebene.
NX NextMotion wurde bei Arnold NextG von Beginn an auf höchste Sicherheitsanforderungen ausgelegt. Die Plattform ist für ASIL D und SIL 3 entwickelt und bildet eine zertifizierbare Ausführungsschicht zwischen Entscheidungssoftware und physischer Fahrzeugbewegung. Damit wird funktionale Sicherheit nicht als Zusatz, sondern als architektonisches Grundprinzip umgesetzt. Wie der Functional-Safety-Experte Dr. Thomas Schneider (AVL) treffend formuliert: „Bei Level 4 entwickelt man nicht, um Fehler zu vermeiden. Man entwickelt, um trotz Fehlern weiter zu funktionieren.“
Redundanz als Systemprinzip: Fail-operational statt Fail-safe
Redundanz ist der zentrale Hebel, um autonome Systeme auch bei Teilversagen handlungsfähig zu halten. In der Praxis bedeutet das nicht nur doppelte Komponenten, sondern konsequent getrennte Funktionspfade. Bei Arnold NextG sind Drive-by-Wire-Systeme nicht nur mehrfach vorhanden, sondern physikalisch und logisch entkoppelt. Mehrere Steuerpfade, getrennte Energieversorgungen und unabhängige Überwachungsmechanismen verhindern, dass ein einzelner Fehler das Gesamtsystem kompromittiert. Fällt ein Pfad aus, übernimmt ein anderer – ohne Kontrollverlust.
Dieses fail-operational Verhalten ist essenziell für Anwendungen wie autonome ÖPNV-Shuttles ohne Sicherheitsfahrer, hochverfügbare Hafenlogistik oder militärische Konvois, bei denen Stillstand oder unkontrollierte Reaktionen erhebliche Risiken bedeuten. NX NextMotion ermöglicht in solchen Szenarien eine kontrollierte Weiterfahrt oder das sichere Erreichen definierter Haltepunkte – selbst unter degradierten Bedingungen.
Cybersecurity: Sicherheit endet nicht bei Sensoren und Aktoren
Mit wachsender Vernetzung autonomer Fahrzeuge wird Cybersecurity zu einem integralen Bestandteil der Systemsicherheit. Ein funktional sicheres System verliert seine Wirkung, wenn Steuerpfade manipuliert oder Software kompromittiert werden können. Regulatorisch sind diese Anforderungen klar definiert. Die UNECE-Regelungen R155 und R156 schreiben für neue Fahrzeugtypen ein ganzheitliches Cybersecurity-Managementsystem sowie die Absicherung von Software-Updates und Over-the-Air-Mechanismen verbindlich vor. Fahrzeuge müssen Angriffsversuche erkennen, Software-Integrität sicherstellen, Ereignisse auditierbar protokollieren und sicherheitskritische Funktionen klar von nicht-kritischen Domänen trennen.
NX NextMotion setzt diese Anforderungen auf mehreren Ebenen um: durch segmentierte Netzwerke, abgesicherte Boot-Mechanismen, verschlüsselte Kommunikationsprotokolle wie SAFE_CAN sowie klar definierte Sicherheitsdomänen für Lenkung, Bremse und Antrieb. Cybersecurity wird damit nicht nachgelagert ergänzt, sondern ist Teil der Steuerungsarchitektur.
Zertifizierung als Nachweis: Sicherheit muss belegbar sein
In regulierten Märkten reicht es nicht aus, Sicherheitskonzepte zu beschreiben – sie müssen nachgewiesen werden. Typgenehmigungen nach UNECE- und ISO-Normen erfordern vollständige Dokumentation, systematische Fehlereinspeisung, Simulation, Laborvalidierung und Erprobung im Realbetrieb. Methoden und Frameworks wie PEGASUS oder ASAM OpenSCENARIO haben sich etabliert, um Szenarien standardisiert zu testen und vergleichbar zu machen. NX NextMotion unterstützt diese Prozesse durch durchgängige Protokollierung von Steuerimpulsen, Zustandswechseln und Sicherheitsreaktionen. OEMs und Systemintegratoren erhalten damit eine belastbare Grundlage für Audits, Zulassung und den Betrieb sicherheitskritischer Fahrzeugflotten.
Trust-by-Design: Vertrauen entsteht im Entwurf
Vertrauen in autonome Systeme lässt sich nicht nachträglich hinzufügen. Es entsteht im Entwurf – durch redundante Steuerpfade, gesicherte Kommunikation, zertifizierte Software-Schnittstellen und ein klar definiertes Verhalten im Fehlerfall. NX NextMotion folgt genau diesem Ansatz: als deterministische Ausführungsschicht, die autonome Entscheidungen nicht trifft, sondern sie sicher, nachvollziehbar und normkonform umsetzt. Damit wird Autonomie für Betreiber, Regulierungsbehörden und Endanwender beherrschbar – auch ohne menschlichen Fahrer an Bord.
Fazit: Sicherheit ist kein Feature – sie ist das System
Autonomes Fahren ist kein Wettbewerb um die beste KI. Es ist eine Systemfrage. Funktionale Sicherheit, Redundanz und Cybersecurity bilden die tragenden Säulen für Vertrauen, Skalierbarkeit und den realen Einsatz autonomer Fahrzeuge. Arnold NextG adressiert diese Anforderungen mit NX NextMotion als ganzheitlicher Motion-Plattform – fail-operational, zertifizierbar und ausgelegt für die sicherheitskritischen Anwendungen von heute und morgen.
We control what moves!
Alle Blogspot-Artikel und weiterführende Informationen unter: www.arnoldnextg.de/blog
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()
Neue Mobilität für schwieriges Terrain – Teleoperation mit System
Ein vollständig ferngesteuerter Traktor.
Teleoperation von Mira GmbH, gesteuert über NX NextMotion – das ausfallsichere Drive-by-Wire-System von Arnold NextG.
Warum ist das relevant?
Weil manche Orte für Menschen einfach zu gefährlich sind:
❗ einsturzgefährdete Tunnel
❗ instabile Baustellen
❗ Minen mit Staub oder Gas
❗ militärische Logistik in Risikozonen
Mit MIRAs Teleoperation bleibt die Kontrolle beim Menschen – aber ohne physische Präsenz.
Gesteuert wird aus einem Multiscreen-Leitstand. Die Fahrzeuge reagieren in Echtzeit über stabile 4G/5G- oder Satellitenverbindungen.
Das Ergebnis: Sicherheit. Kontrolle. Kein Risiko.
Und die Technik dahinter?
NX NextMotion liefert das digitale Rückgrat: modulare Sicherheitsarchitektur (ASIL-D, SIL3), Mehrfach-Redundanz, präzise Aktuatorsteuerung. Kein Prototyp – TÜV-zertifiziert und bereit für den Feldeinsatz.
Gezeigt wurde es im Traktor auf der Agritechnica. Das Potenzial?
Bau. Bergbau. Verteidigung. Landwirtschaft.
Überall dort, wo Maschinen arbeiten müssen – aber Menschen geschützt bleiben sollen.
We control what moves.
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()

Arnold NextG Blogspot: Wie Fahrzeuge ihre Umwelt wahrnehmen – Sensorik und Fusion im autonomen Fahren
Doch „sehen“ allein genügt nicht. Für autonome Systeme zählt nicht das Erfassen von Objekten, sondern das Verstehen von Situationen – robust, redundant und ohne Zeitverlust. Genau hier setzt die Sensorfusion an: Sie verknüpft unterschiedliche Sensordaten zu einem konsistenten, belastbaren Weltmodell – als Grundlage für jede automatisierte Entscheidung.
Dieser Artikel beleuchtet die technischen Grundlagen moderner Fahrzeugsensorik, zeigt konkrete Anwendungsfelder – und erklärt, warum Wahrnehmung erst durch Drive-by-Wire zur Sicherheitsarchitektur der Zukunft wird.
Die „Sinne“ autonomer Fahrzeuge: Sensorarten im Überblick
Die Grundlage jeder automatisierten Entscheidung ist ein vollständiges, verlässliches Bild der Umgebung. Dafür setzen autonome Fahrzeuge auf ein ganzes Sensor-Ökosystem. Jeder Sensortyp hat spezifische Aufgaben und technische Stärken – aber auch Einschränkungen:
- Kameras erfassen visuelle Merkmale wie Farben, Beschilderungen und Fahrbahnmarkierungen – sind jedoch anfällig bei Dunkelheit oder Blendung.
- Radar misst präzise Entfernungen und Geschwindigkeiten – unabhängig vom Wetter, aber mit geringerer Auflösung.
- LiDAR erzeugt hochdetaillierte 3D-Punktwolken – empfindlich, aber ideal für Tiefenwahrnehmung.
- Ultraschallsensoren bieten robuste Nahbereichserkennung – etwa beim Parken oder Rangieren.
- IMUs und GPS liefern Informationen über Position, Beschleunigung und Orientierung – unverzichtbar für Eigenlokalisierung und Stabilisierung.
„Es gibt keine Sensor-Wunderwaffe. Echte Wahrnehmung entsteht durch Redundanz und Fusion.“ Dr. Alex Grbic, CTO, AEye Lidar Systems
Sensorfusion: Die Kunst der konsistenten Weltsicht
Damit autonome Systeme zuverlässig funktionieren, müssen sie nicht nur „sehen“, sondern verstehen. Genau hier setzt die Sensorfusion an. Sie kombiniert unterschiedliche Sensordaten zu einem belastbaren, mehrdimensionalen Weltmodell – und gleicht dabei Stärken und Schwächen einzelner Sensoren aus.
Die Sensorfusion erfolgt typischerweise auf drei Ebenen:
- Low-Level-Fusion: Zusammenführung roher Sensordaten
- Mid-Level-Fusion: Kombination erkannter Objektmerkmale
- High-Level-Fusion: Interpretation und Entscheidungsfindung aus konsolidierten Daten
Das Ziel: eine redundante, widerspruchsfreie Grundlage für automatisierte Entscheidungen. Diese Grundlage ist essenziell, sobald sich Fahrzeuge autonom oder teilautonom bewegen – etwa auf SAE-Level 3 und höher.
„Sensorfusion ist entscheidend für Redundanz und Vertrauen – besonders ab SAE-Level 3.“ White Paper von Mobileye & Intel, 2024
Anwendungsfelder: Von urbaner Komplexität bis zu industrieller Präzision
Die praktische Relevanz von Sensorfusion zeigt sich in verschiedensten Branchen:
- Öffentlicher Verkehr: Autonome Shuttles kombinieren Kamera- und LiDAR-Daten, um Ampeln, Fahrgäste und Verkehrsdichte sicher zu erkennen – auch im urbanen Umfeld.
- Logistik & Hafenbetrieb: Radarbasiertes Obstacle Avoidance mit LiDAR-Feinjustierung ermöglicht kollisionsfreies Andocken – unterstützt durch GPS und IMUs.
- Bergbau & Baustellen: In extremen Umgebungen kommen Radar, Wärmebildtechnik und robuste Steuerlogiken zum Einsatz – kombiniert mit redundanter Fernsteuerung.
- Verteidigung: Militärische Fahrzeuge nutzen mehrschichtige Sensorarrays mit separater Rechentechnik – für eine fail-operational Architektur auch bei Ausfällen.
Wahrnehmung reicht nicht – Handlung in Echtzeit ist der Schlüssel
Die beste Sensorik nützt nichts, wenn die Entscheidung zu spät kommt. Entscheidend ist die nahtlose Verbindung von Wahrnehmung und Steuerung – mit minimaler Latenz. Sobald ein Objekt durch die Sensorfusion klassifiziert wurde, muss das Fahrzeug sofort reagieren: bremsen, ausweichen, stoppen.
Genau dafür wurde NX NextMotion entwickelt – die zentrale Motion-Plattform von Arnold NextG. Sie verknüpft:
- 4-fach redundante Sensor- und Steuerungspfade
- Realtime-Perzeption und Edge-Computing
- Zertifizierte Drive-, Steer- und Brake-by-Wire-Technologie
Diese Kombination ermöglicht eine durchgängige, fehlertolerante Kette von der Objekterkennung bis zur Fahrzeugaktion – inklusive Cybersecurity nach ISO 21434 und Sicherheitsarchitektur nach ASIL D und SIL3.
KI & Edge: Der nächste Schritt in der Fahrzeugwahrnehmung
Mit wachsender Systemintelligenz verlagert sich die Datenverarbeitung zunehmend in das Fahrzeug selbst. Edge-AI ersetzt zentrale Cloud-Logik – Reaktionen erfolgen lokal, in Millisekunden. Das reduziert Abhängigkeiten, steigert Ausfallsicherheit und eröffnet neue Möglichkeiten für selbstlernende Systeme.
Gleichzeitig steigen die Anforderungen an:
- Thermomanagement und Echtzeitverarbeitung
- Cybersecurity in verteilten Systemen
- Zuverlässigkeit unter extremen Bedingungen
Die NX NextMotion-Plattform von Arnold NextG ist für diese Anforderungen gerüstet – durch ihre modulare Architektur, integrierte Diagnosesysteme und plattformunabhängige Kompatibilität.
Fazit: Wahrnehmung ist mehr als Sensorik – sie ist Vertrauen in Echtzeit
Autonomes Fahren beginnt mit Erkennen – aber es endet mit Verstehen und Handeln. Echte Sicherheit entsteht durch Redundanz, Fusion und eine robuste, echtzeitfähige Steuerungsarchitektur. Arnold NextG setzt mit NX NextMotion neue Maßstäbe für verlässliche, skalierbare Fahrzeugintelligenz – unabhängig vom Fahrzeugtyp oder Einsatzgebiet.
Die Zukunft gehört Systemen, die in Sekundenbruchteilen entscheiden – und in jeder Sekunde Sicherheit garantieren.
We control what moves!
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. [url=http://www.arnoldnextg.de]www.arnoldnextg.de[/url]
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()
Arnold NextG Blogspot: Was bedeutet Autonomes Fahren wirklich – Einblick in das System hinter den Schlagworten
In diesem ersten Teil unserer Blogserie werfen wir einen systemischen Blick auf das Thema:
- Was bedeutet „autonom“ technisch und regulatorisch?
- Welche Systemschichten ermöglichen automatisierte Mobilität?
- Und welche Rolle spielt Drive-by-Wire dabei im Hintergrund?
Autonomes Fahren ist kein Produkt – sondern ein vernetztes System
Autonome Mobilität ist nicht das Ergebnis eines einzelnen Fahrzeugs, sondern eines verteilten Systems, das Echtzeitdaten verarbeitet, Entscheidungen trifft und physische Bewegungen auslöst – sicher, nachvollziehbar und unter allen Betriebsbedingungen. Die SAE International definiert sechs Automatisierungsgrade von Level 0 bis Level 5 – ein internationaler Referenzrahmen, der mittlerweile Standard für Entwickler, Zulassungsbehörden und Industrie ist.
Der Großteil marktfähiger Systeme bewegt sich aktuell zwischen Level 2 und 3. Level 4 ist technisch möglich – aber nur in klar eingegrenzten Zonen, mit definierten Umgebungsparametern und umfassender Redundanzstruktur. Laut dem Bundesministerium für Digitales und Verkehr (BMDV) wird der flächendeckende Einsatz autonomer Systeme erst mit entsprechender Infrastruktur und übergreifenden Standards möglich sein.
Die funktionalen Schichten autonomer Mobilität
Technisch basiert autonome Mobilität auf sechs Schichten, die eng miteinander verzahnt sind:
- Sensorik: LiDAR, Radar, Kamera, Ultraschall – liefern Rohdaten zur Umgebung
- Perzeption & Fusion: Realtime-Interpretation und kombinierte Umgebungsmodelle
- Planung & Entscheidung: Trajektorienberechnung, Manöverlogik, Prädiktion
- Aktorik: Vollelektronische Ausführung über Drive-, Steer- und Brake-by-Wire
- Safety & Redundanz: Normenkonformität (ASIL D, ISO 21434), Fehlertoleranz, Fail-operational
- Vernetzte Infrastruktur: V2X, HD-Karten, 5G, Cloud-Backend, Teleoperation
Diese Struktur ist nicht optional – sie ist erforderlich, um autonome Systeme in Serie zu bringen. Der Branchenverband Bitkom e.V. betont in seinem Thesenpapier 2024, dass nur durch eine enge Verzahnung dieser Ebenen echte Skalierung möglich wird – von Pilotprojekten hin zu flächendeckendem Betrieb.
Kein Unternehmen kann Autonomie allein umsetzen
Die Realität zeigt: Erfolgreiche autonome Systeme entstehen nicht in Silos, sondern in Ökosystemen. OEMs, Zulieferer, Softwarehäuser, Sensorhersteller, Infrastrukturprovider und Regulierungsbehörden arbeiten zunehmend in strategischen Allianzen.
Ein Beispiel liefert Volvo Autonomous Solutions, durch Integration der Aurora-Software in eigene Fahrzeuge und Sicherheitsarchitekturen.. Redundanz, Cybersecurity und Safety-by-Design sind hier zentral – ein Vorgehen, das richtungsweisend für die gesamte Branche ist.
Auch Arnold NextG ist Teil solcher Ökosysteme – mit Lösungen, die von autonomen Shuttles im öffentlichen Verkehr bis hin zu remote-gesteuerten Maschinen im Bergbau, der Landwirtschaft oder Logistik reichen.
Die Rolle von Drive-by-Wire im Ökosystem
Drive-by-Wire gilt als Grundvoraussetzung für Level-4- und Level-5-Anwendungen. Denn: Nur eine vollelektronische Steuerung von Antrieb, Lenkung und Bremse erlaubt die vollständige Entkopplung vom Menschen – sei es für autonome Fahrten oder per Fernsteuerung.
- ISO 26262 (ASIL D) beschreibt die funktionale Sicherheit in Straßenfahrzeugen und legt Prozesse zur Risikominimierung durch systematische Fehler fest
- IEC 61508 (SIL3) ist der übergeordnete internationale Standard für elektrische/elektronische Sicherheitssysteme und Basis für ISO 26262
ISO/SAE 21434 definiert Cybersecurity-Anforderungen entlang des gesamten Fahrzeuglebenszyklus - UNECE R155 verlangt ein Cybersecurity-Managementsystem für vernetzte Fahrzeuge, das z. B. durch ISO/SAE 21434 abgedeckt werden kann
Arnold NextG adressiert diese Anforderungen mit einer durchgängig integrierten Sicherheitsarchitektur – inklusive isolierter Kommunikationskanäle, Echtzeit-Validierung, Cybersecurity-Frameworks und Over-the-Air-Funktionen.
Beyond Automotive: Autonome Systeme in Spezialanwendungen
Autonomie ist längst nicht mehr auf den klassischen Pkw beschränkt – der Bedarf reicht weit über das „Automotive“-Kerngeschäft hinaus. NX NextMotion ist bereits in zahlreichen Sektoren im Einsatz:
- Öffentlicher Verkehr: Level-4-Shuttles ermöglichen Mobilität im ländlichen Raum
- Logistik & Häfen: Teleoperation im 24/7-Betrieb
- Landwirtschaft: RTK-gesteuerte Feldroboter mit Force Feedback
- Bergbau: Fahrzeuge für gefährliche, nicht zugängliche Zonen
- Verteidigung: teilautonome Konvois mit NATO-Kompatibilität
- Inklusion: intuitive Mobilität für Menschen mit Einschränkungen
Die Anforderungen sind unterschiedlich – aber die technische Basis ist gleich: ein skalierbares, robustes Drive-by-Wire-System.
Fazit: Systemdenken entscheidet über den Fortschritt
Autonomes Fahren ist keine Vision – sondern Realität in modularen, kooperativen Systemen. Wer in diesem Umfeld bestehen will, braucht verlässliche Partner, zertifizierte Systeme und ein tiefes Verständnis für technologische Interdependenzen. Arnold NextG liefert mit NX NextMotion eine Plattform, die diesen Anforderungen gerecht wird – robust, skalierbar und bereit für den realen Einsatz.
In den nächsten Teilen dieser Serie widmen wir uns den einzelnen Ebenen – beginnend mit der Sensorik und der Frage: Wie sehen Maschinen eigentlich ihre Umwelt?
We control what moves.
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Business and Corporate Development
E-Mail: mathias.koch@arnoldnextg.de
![]()

DLG-Medaille in Silber für DuxAlpha beim Innovation Award AGRITECHNICA 2025
Mit DuxAlpha wird der Traktor zum digitalen Zwilling des Ackers: Das System kartiert Geländeformen dreidimensional, berechnet Spurlinien mit bis zu 2,5 cm Genauigkeit und synchronisiert sämtliche Maschinenprozesse in Echtzeit. Jeder Arbeitsgang – von der Spurführung über die Ausbringmenge bis zur Kostenübersicht – wird automatisch erfasst. Die Bedienung erfolgt intuitiv über ein Terminal oder per App – auf Wunsch auch nachrüstbar für Maschinen ohne werkseitige Vorbereitung – von älteren bis zur neuen Hightech-Maschine.
„Mit DuxAlpha bringen wir die Zukunft aufs Feld“, betont Kevin Arnold, Geschäftsführer von DuxAlpha. „Die Auszeichnung mit der Silbermedaille ist für unser gesamtes Team eine große Ehre und ein starkes Signal. Sie zeigt, dass unsere Vision von einer vernetzten, automatisierten und nachhaltigen Landwirtschaft nicht nur denkbar, sondern längst Realität ist. DuxAlpha ist nicht einfach ein weiteres Lenksystem – es ist weit mehr: die technologische Plattform, auf der Präzision, Automatisierung und Effizienz nahtlos zusammenwirken. Wir bedanken uns herzlich bei der DLG und der Neuheitenkommission für diese Anerkennung.“
Auch Christoph Heiß, Entwicklungsleiter DuxAlpha, hebt die technische Tiefe hervor: „DuxAlpha setzt neue Maßstäbe – von der Steuergeräteplattform bis zur Softwarearchitektur. Mit jahrzehntelanger Erfahrung denken wir Schnittstellen und Funktionen für die nachhaltige Landwirtschaft von morgen bereits heute mit. Unser System adressiert nicht nur die Maschine, sondern den gesamten Betrieb: Es ermöglicht Landwirten schon jetzt Aufgaben zu automatisieren, schafft maximale Effizienz, spart wertvolle Zeit und senkt dadurch entscheidend die Kosten. Vom ersten Bearbeitungsgang bis zur automatischen Dokumentation läuft alles nahtlos im Hintergrund – das entlastet den Fahrer und schafft Transparenz auf Knopfdruck.“
Das System vereint sechs zentrale Stärken in einer durchgängigen Gesamtlösung: Präzision in 3D ermöglicht topografiegerechte Spurplanung mit bis zu 2,5 cm Genauigkeit – selbst in Hanglagen. Automatisierte Feldarbeit sorgt dafür, dass Arbeitsgänge selbstständig erkannt, dokumentiert und abgerechnet werden. FarmLink, die offene Schnittstelle zur Cloud, vernetzt Traktoren, Anbaugeräte und Sensoren zu einem lernfähigen System. Die smarte Maschinenlogik erlaubt das Zusammenspiel mehrerer Fahrzeuge auf einen Schlag – effizient, synchronisiert und bedienerentlastend. Und dank der Echtzeit-Konnektivität stimmen Maschinen untereinander ihre Positionen und Aufgaben live ab – ohne Verzögerung. DUXALPHA ist markenunabhängig nachrüstbar, von älteren Maschinen bis zum neuesten Hightech-Schlepper. Damit wird DuxAlpha zur Plattform für eine neue Generation digitaler Landwirtschaft – effizient, vernetzt und bereit für die autonome Zukunft.
Die Vision von DuxAlpha und Arnold NextG
Die einzigartige Technologie von DuxAlpha in Verbindung mit dem Drive-by-Wire System NX NextMotion von Arnold NextG bildet die Grundlage für vollständig autonome Prozesse in der Landwirtschaft. Während klassische Lenksysteme auf Teilfunktionen begrenzt sind, ermöglicht diese Kombination erstmals weltweit ein System, das den gesamten Ablauf automatisiert, inklusive der eigenständigen Steuerung von Fahrzeugen vom Betriebshof aufs Feld und wieder zurück – mit Straßenzulassung, ganz ohne Sicherheitsfahrer, Einschränkungen oder Auflagen. Dieses Zusammenspiel steht für maximale Effizienz, höchste Nachhaltigkeit und konsequente Kostensenkung und mündet direkt in eine deutlich gesteigerte Wettbewerbsfähigkeit. Gemeinsam setzen Arnold NextG und DuxAlpha damit einen neuen Standard für die Zukunft der Landwirtschaft und Fahrzeugindustrie.
Besuchen Sie uns auf der AGRITECHNICA 2025 – Halle 21, Stand H05.
Über DuxAlpha:
DuxAlpha ist das erste 3D-Spurplanungssystem, das Maschinenvernetzung, Echtzeit-Datenabgleich und automatisierte Dokumentation in einem System vereint. Es ist markenoffen, nachrüstbar und intuitiv bedienbar – bereit für die nächste Stufe der Digitalisierung: vom Fahrersitz bis zur autonomen Anwendung. www.duxalpha.com
Über Arnold NextG:
Arnold NextG realisiert die Safety-by-Wire®-Technologie von morgen: das mehrfach redundante Zentralsteuergerät NX NextMotion ermöglicht eine ausfallsichere und individuelle Implementierung, fahrzeugplattform-unabhängig und weltweit einzigartig. Mit dem System können autonome Fahrzeugkonzepte sicher und nach den neuesten Hard- und Software- sowie Sicherheitsstandards umgesetzt werden, ebenso wie Remote-, Teleoperation- oder Platooning- Lösungen Als unabhängiger Vorausentwickler, Inkubator und Systemlieferant übernimmt Arnold NextG die Planung und Umsetzung – von der Vision bis zur Straßenzulassung. Mit der Straßenzulassung von NX NextMotion setzen wir den globalen Drive-by-Wire-Standard. www.arnoldnextg.de
About Arnold NextG:
Arnold NextG realizes the safety-by-wire® technology of tomorrow: The multi-redundant central control unit NX NextMotion enables a fail-safe and individual implementation, independent of the vehicle platform and unique worldwide. The system can be used to safely implement autonomous vehicle concepts in accordance with the latest hardware, software and safety standards, as well as remote control, teleoperation or platooning solutions. As an independent pre-developer, incubator and system supplier, Arnold NextG takes care of planning and implementation – from vision to road approval. With the road approval of NX NextMotion, we are setting the global drive-by-wire standard. www.arnoldnextg.com
Arnold NextG GmbH
Breite 3
72539 Pfronstetten-Aichelau
Telefon: +49 171 5340377
http://www.arnoldnextg.de
Pressesprecherin
E-Mail: marketing@duxalpha.com
![]()